NavTrust:壊れたセンサーと壊れた指示で、Embodied Navigation はどこまで崩れるか
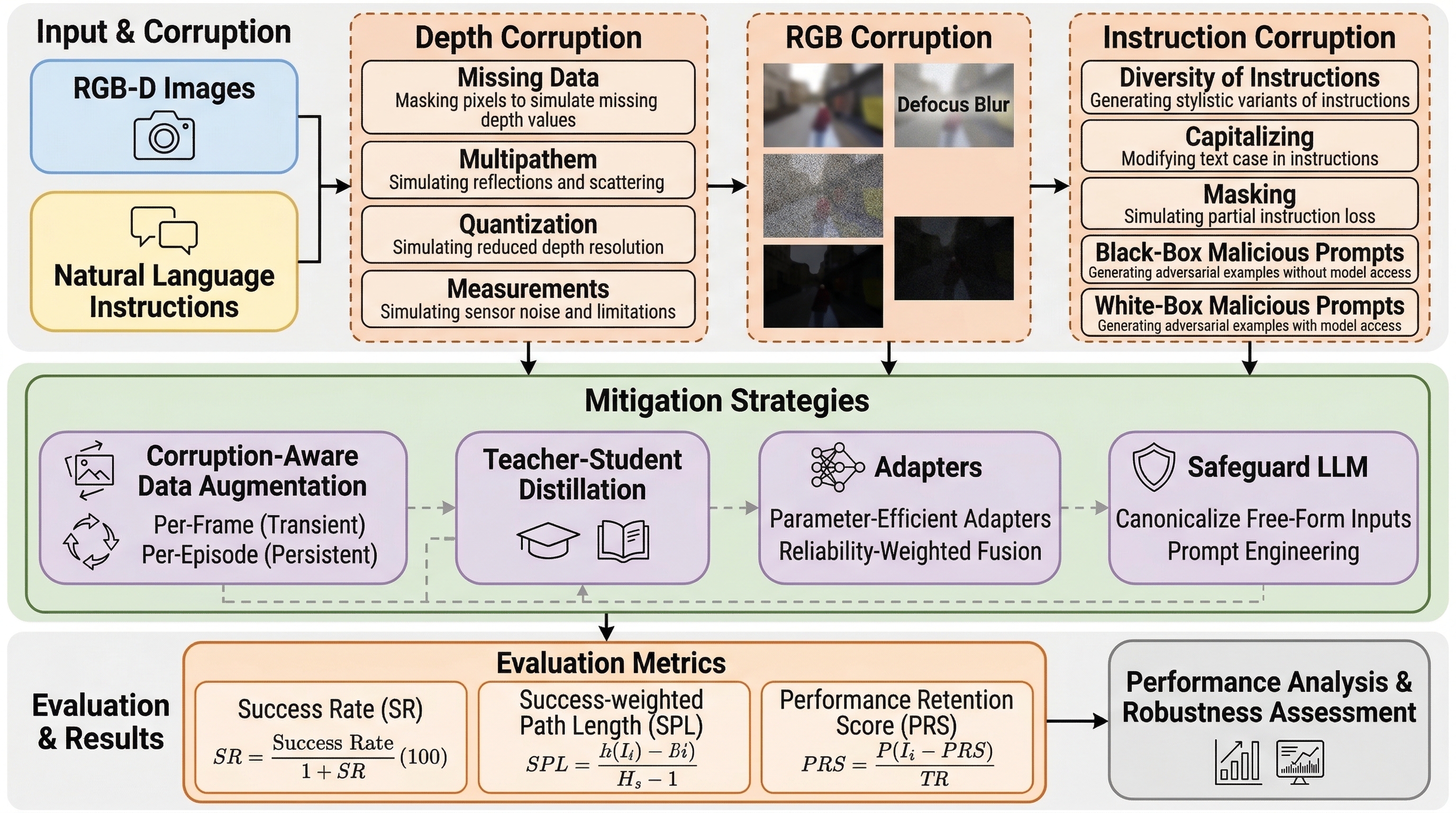
NavTrust は、視覚と言語によるナビゲーションと物体目標ナビゲーションを同じ枠組みで評価しながら、RGB、深度、指示文の破損を系統的に注入して、実世界に近い条件でどれだけ信頼性が崩れるかを測るベンチマークです。
最新の論文記事を読みやすく整理。保存・タグ検索に加え、Plus/Proでは研究ノートと知識グラフで理解を積み上げられます。
Cog AI Archive
NavTrust は、視覚と言語によるナビゲーションと物体目標ナビゲーションを同じ枠組みで評価しながら、RGB、深度、指示文の破損を系統的に注入して、実世界に近い条件でどれだけ信頼性が崩れるかを測るベンチマークです。
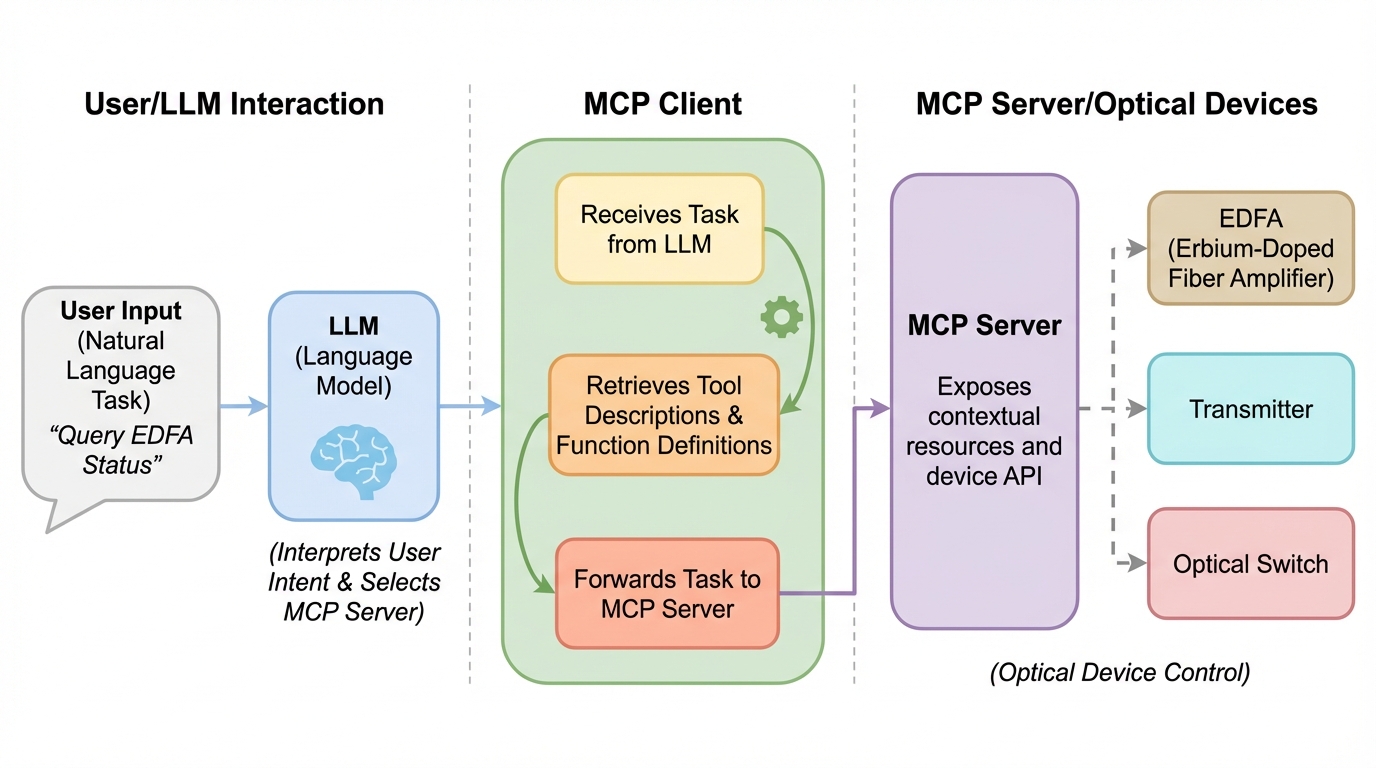
AgentOpticsは、言語モデルの推論とデバイス実行をMCPで分離し、自然言語の指示から異種な光デバイス操作を高忠実度に自律実行する枠組みです。 / 8種類の代表的な光デバイスに対して64個の標準化ツールを用意し、要求理解や複数手順の連携、言い換えへの頑健性、エラー対応まで含む410タスクのベンチマークで、商用オンラインLLMとローカルのオープンソースLLMを評価しました。 / 平均成功率は87.7%〜99.0%でコード生成方式(最大50%)を上回り、DWDMの回線設定、400 GbEとARoFの協調監視、偏波安定化、DAS監視など、装置単体を超えたオーケストレーションと閉ループ最適化も示しました。
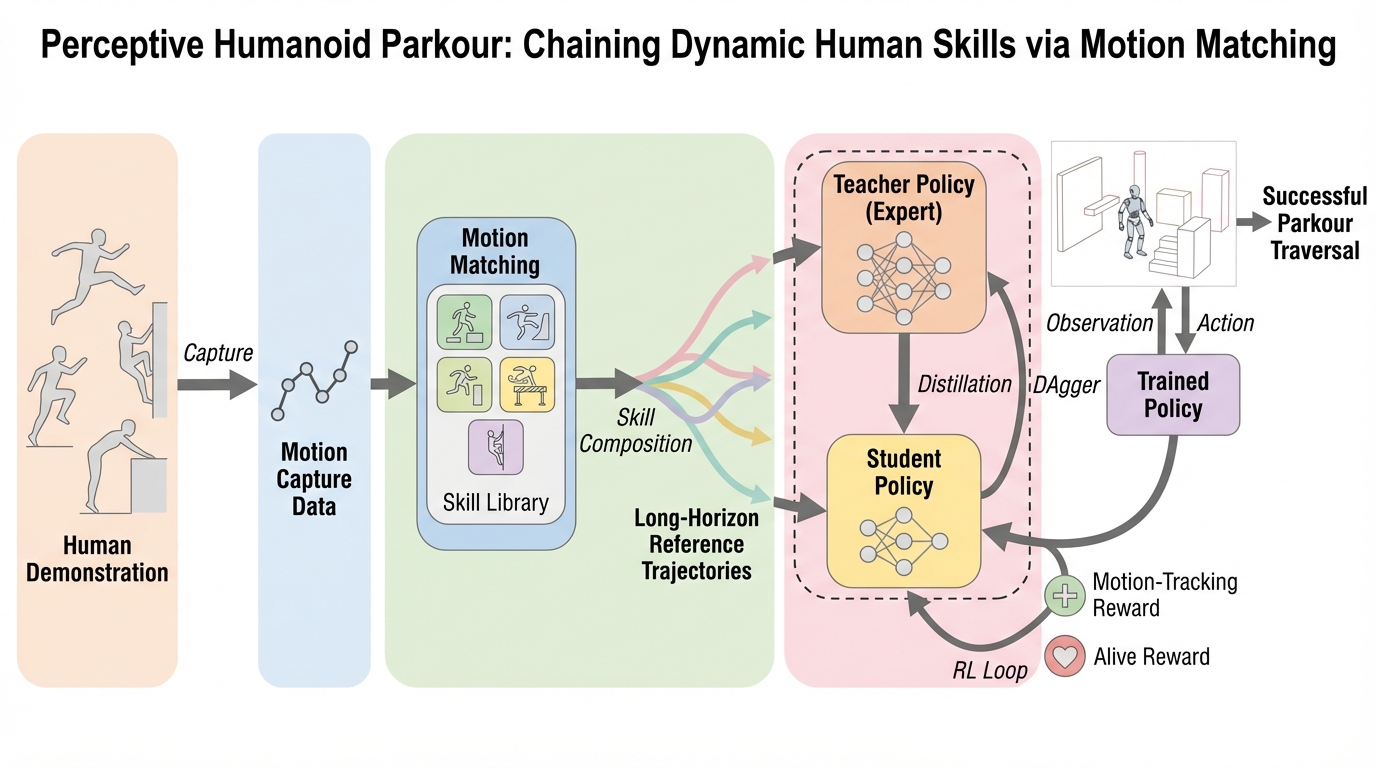
少数で短い人間の高ダイナミクス動作データからでも、ヒューマノイドが視覚にもとづいて障害物コースを長時間にわたり自律走破できるようにする、モジュール型の枠組みが示されています。 / Motion Matchingを特徴空間での最近傍探索として使い、歩行・走行と原子スキルをつないで長時間の参照軌道を合成し、その参照を追従する複数の強化学習専門家を学習したうえで、DAggerと強化学習を組み合わせて深度入力の単一方策へ蒸留します。 / Unitree G1の実機で、深度センサと離散的な2次元速度指令だけを用い、約3 m/sの跳び越えや1.25 m(身長の96%)までの壁登り、60秒の連続走破、障害物の摂動に対する閉ループ適応が確認されています。
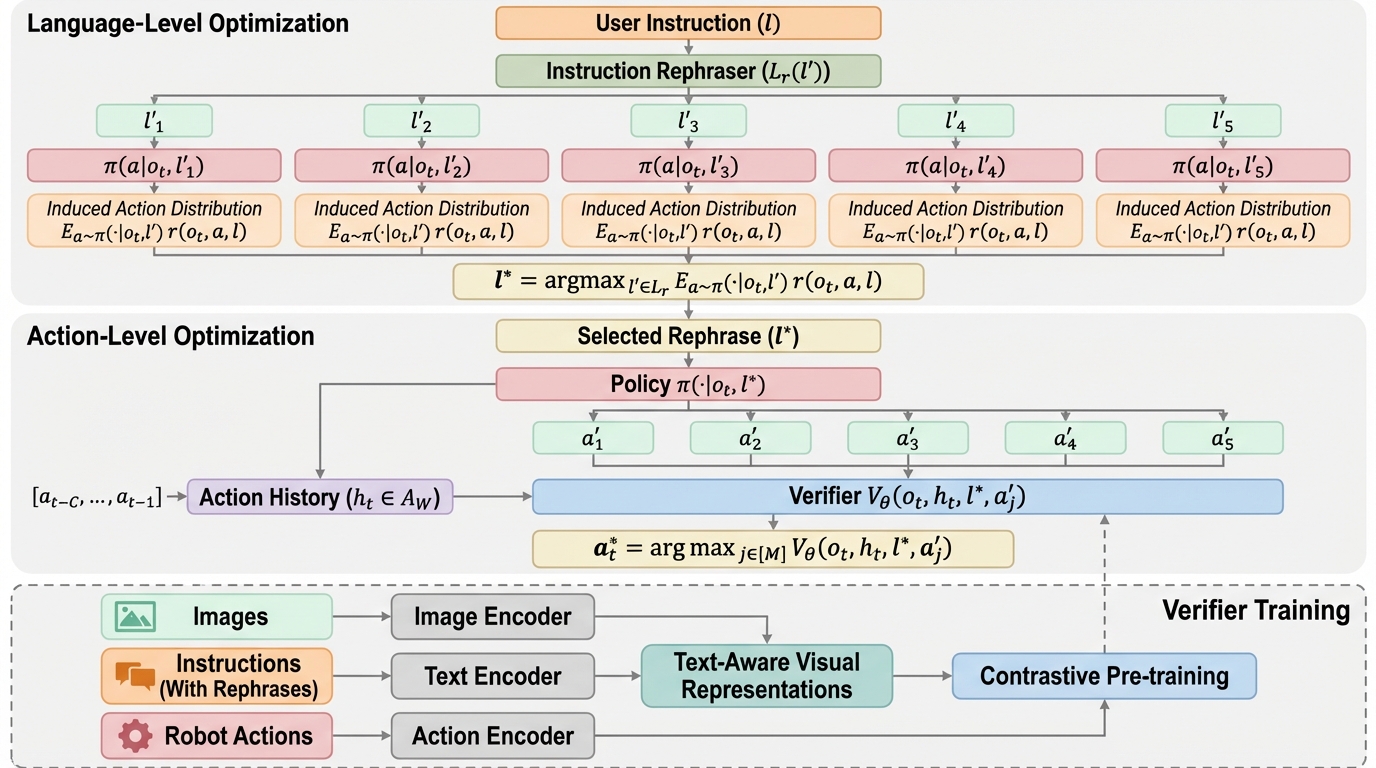
汎用ロボットの実現を阻む「意図と行動のギャップ」を解消するため、本研究はポリシー学習の強化ではなく、推論時の検証(テスト時スケーリング)を拡張する新フレームワーク「CoVer-VLA」を提案しました。
都市部の交通信号制御を「条件付きシーケンス生成問題」として再定義し、グラフアテンションによる空間協調と時系列トランスフォーマーを統合した新アーキテクチャ「MADT」を提案した。 従来の強化学習のような膨大な試行錯誤を必要とせず、オフラインの履歴データから学習が可能であり、目標とする報酬(Return-to-go)を指定することで、状況に応じた柔軟かつ効率的な信号制御を実現する。 アトランタやボストンの実データを用いた検証では、既存の最先端手法と比較して平均旅行時間を5〜6%短縮し、隣接する交差点間での高度な協調(グリーンウェーブ)を達成できることを証明した。
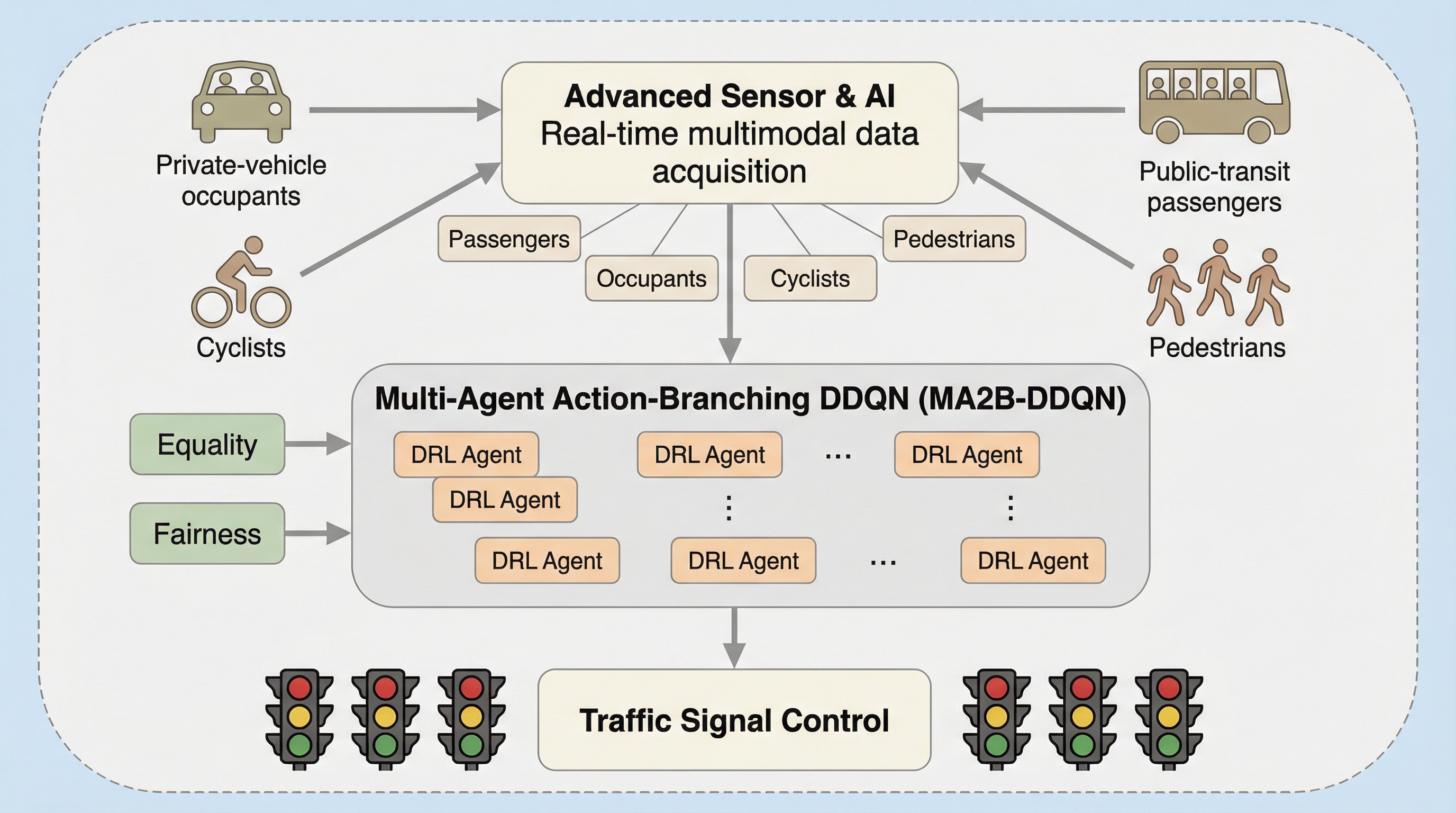
従来の車両台数や待ち時間を優先する「車両中心」の信号制御から、歩行者や公共交通機関の利用者を含むすべての移動者の公平性を最適化する「人間中心」のフレームワーク「MA2B-DDQN」を提案し、都市交通における公平性と持続可能性の両立を目指しました。
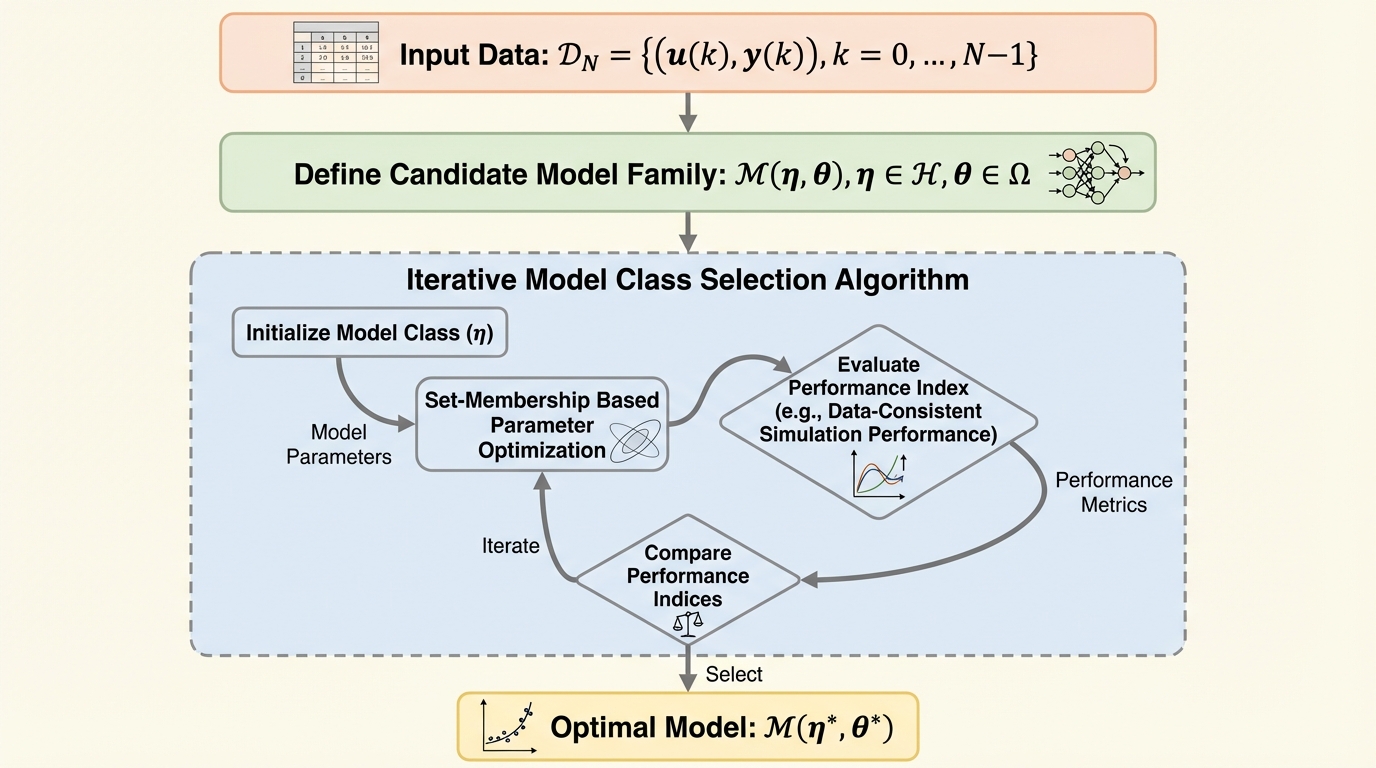
非線形動的システムの同定において、モデル構造の選択とパラメータ学習を同時に実行する、セットメンバーシップ(SM)法に基づいた新しい統合的アプローチが提案された。この手法は、特に自己回帰成分を持つニューラルモデルにおいて、データの不確実性を考慮しながら最適なモデルクラスを特定し、制御に適した簡潔なモデルを構築することを目的としている。 具体的な対象として、外生入力を伴う非線形自己回帰エコーステートネットワーク(NARXESN)を採用し、有界な測定ノイズを明示的に扱うことで、過学習を防ぎつつシステムの動的な振る舞いをロバストに捉える。これにより、従来は計算負荷が高かった自己回帰モデルの性能評価を、データ一貫性のある指標を用いて効率的に行うことが可能になった。 提案されたフレームワークは、セット距離(set-distance)という新しい性能指標とヒューリスティックな探索手順を組み合わせることで、複雑な非線形システムの同定プロセスを自動化している。結果として、計算コストを抑えながら、実世界のアプリケーションで要求される精度とモデルの簡潔さを両立させる信頼性の高い動的モデルの生成を実現している。
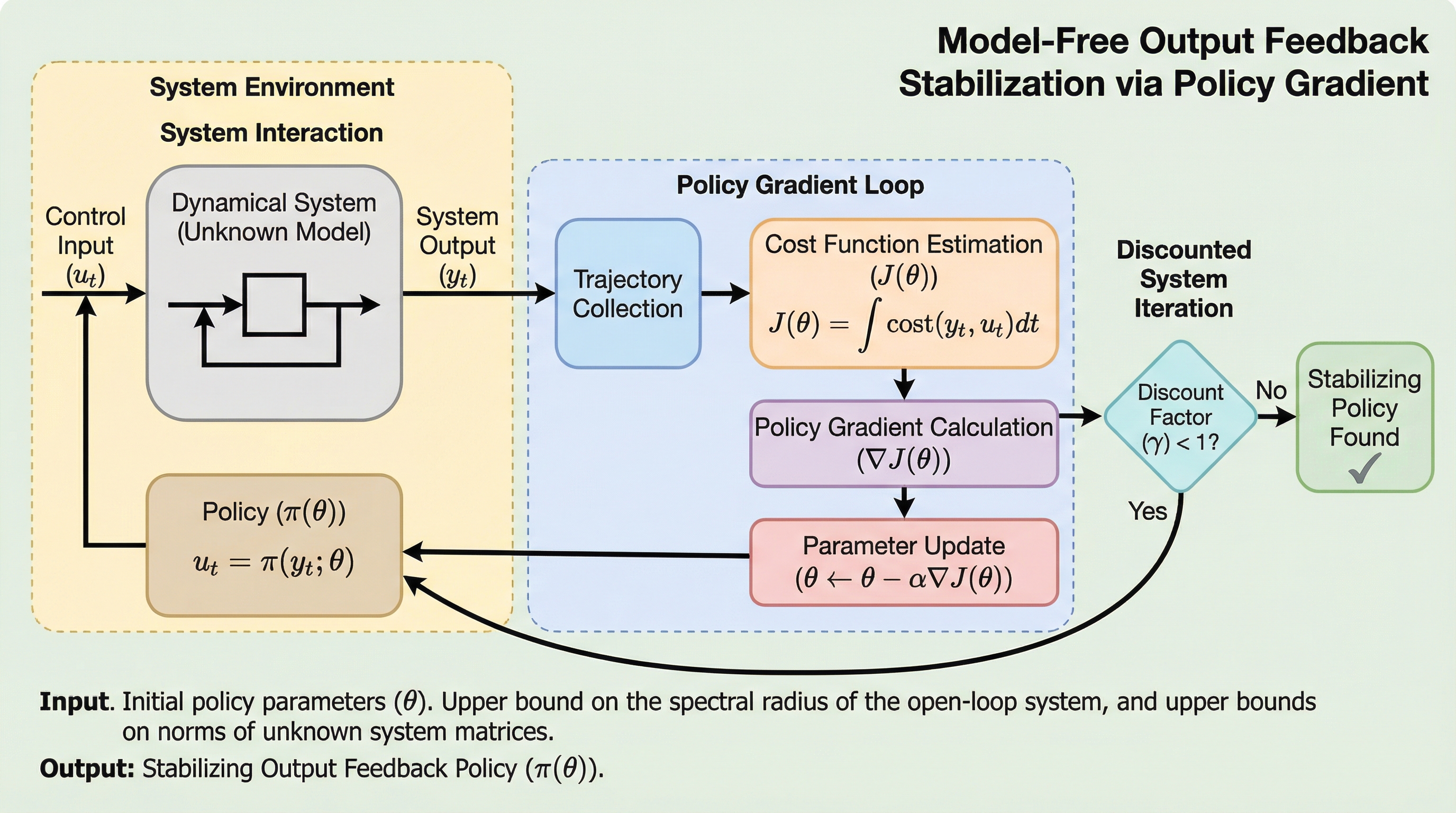
本研究は、システムモデルが未知で一部の出力しか観測できない離散時間線形システムにおいて、方策勾配法を用いてシステムを安定化させる静的出力フィードバック制御器を直接学習する新しいアルゴリズム枠組みを提案しました。
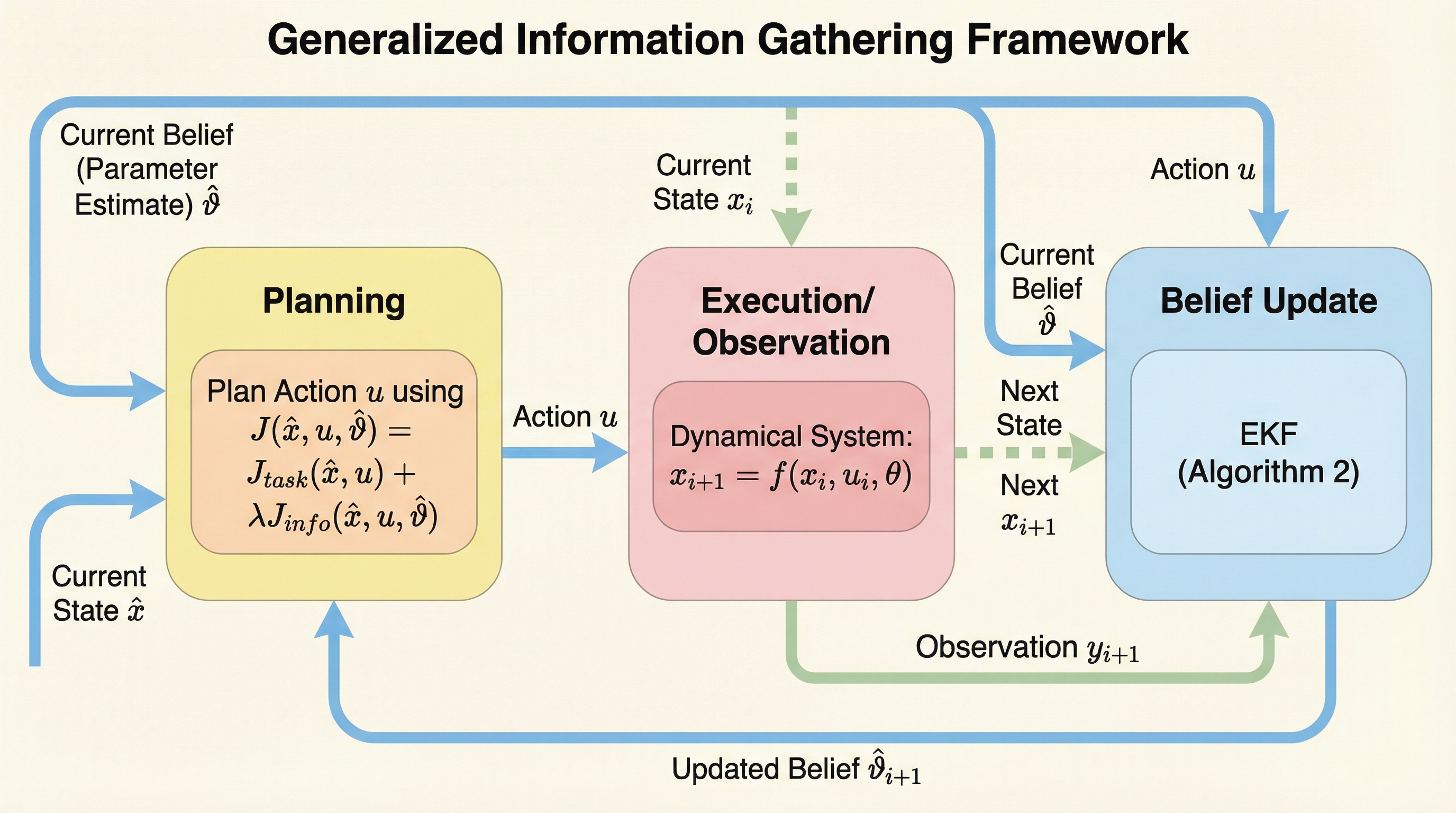
未知の力学系で作動するエージェントが、特定のモデルや更新手法に依存せずに効率的な学習を行うための、因果関係を明示した一般化された情報収集フレームワークを提案しています。この枠組みは、パラメータ、信念、制御、状態、観測の間の複雑な依存関係を因果グラフによって整理し、学習と計画のプロセスを完全に分離して設計することを可能にします。 マッセイの有向情報量に基づいた新しいコスト関数を導入し、従来の相互情報量を用いる手法が特定の条件下における特殊なケースであることを数学的に証明することで、既存手法に理論的な正当性を与えました。これにより、ガウス過程やニューラルネットワークなど、異なるモデル構造を採用した場合でも、統一的な数理基盤の上で最適な情報収集行動を導出できます。 この枠組みは、線形・非線形システムやマルチエージェント環境において、学習アルゴリズムと計画アルゴリズムを柔軟に組み合わせることを可能にし、未知の他者に関する情報の能動的な取得を容易にします。実験では、自律走行車が他者の意図を推定するシナリオなどを通じて、提案手法が多様なタスクにおいて一貫した性能を発揮し、システムの安全性を高めることを実証しました。
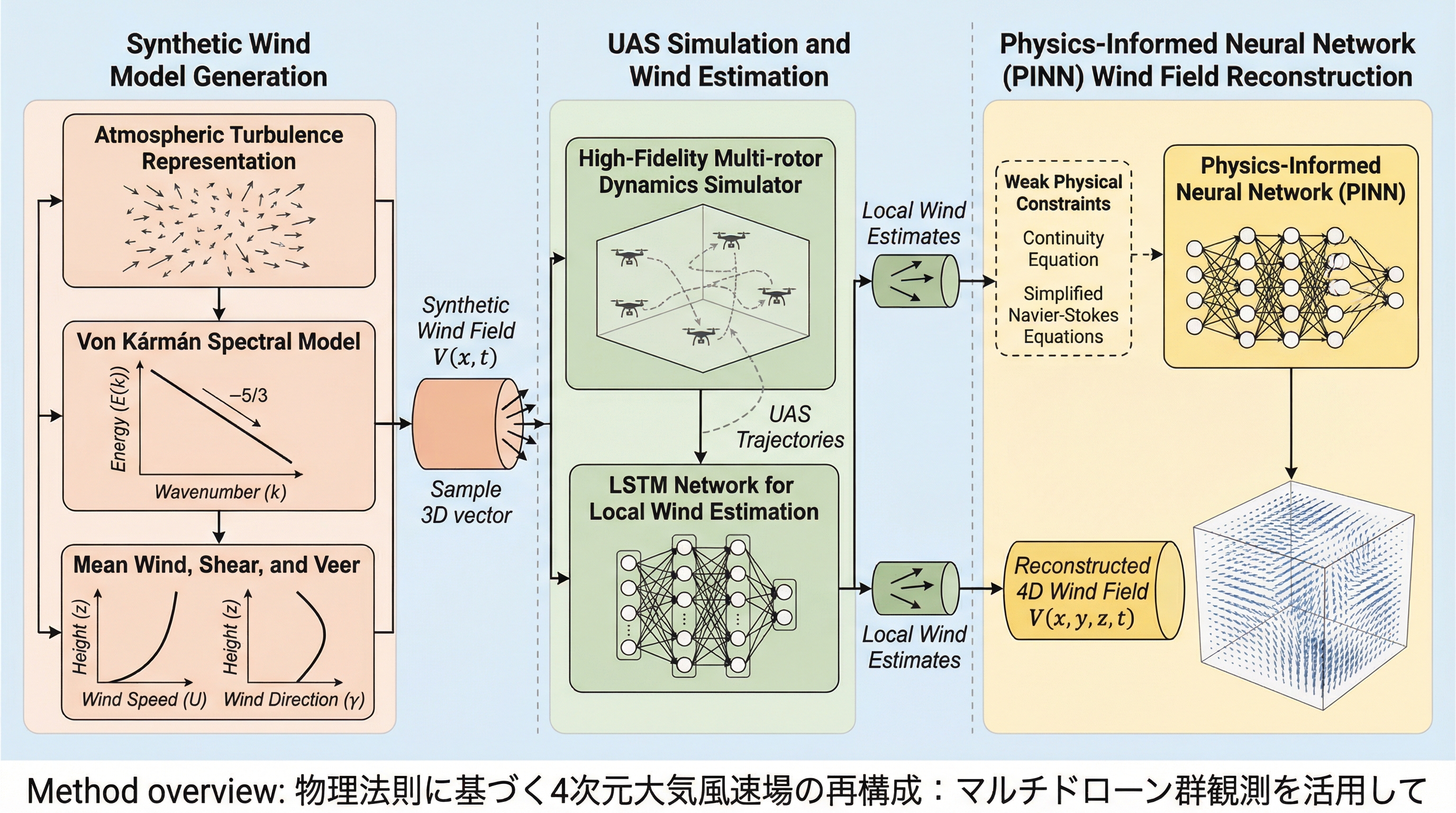
1. 複数の無人航空機システム(UAS)の群れを活用し、専用の風速センサーを搭載することなく機体の動的応答のみから局所的な風速を推定し、時間と空間の4次元で大気風速場を再構成する革新的なフレームワークを提案した。 2.