Transformerベースのモデルを用いたマルチエージェント軌道予測における教師なし異常検知
自動運転の安全性評価において、稀にしか発生しない危険なシナリオを効率的に特定するため、マルチエージェント間の複雑な相互作用を考慮できるTransformerベースの教師なし異常検知フレームワークを開発し、ラベルのない大規模な自然運転データから物理的な意味を持つリスクを抽出する手法を確立しました。
TL;DR(結論)
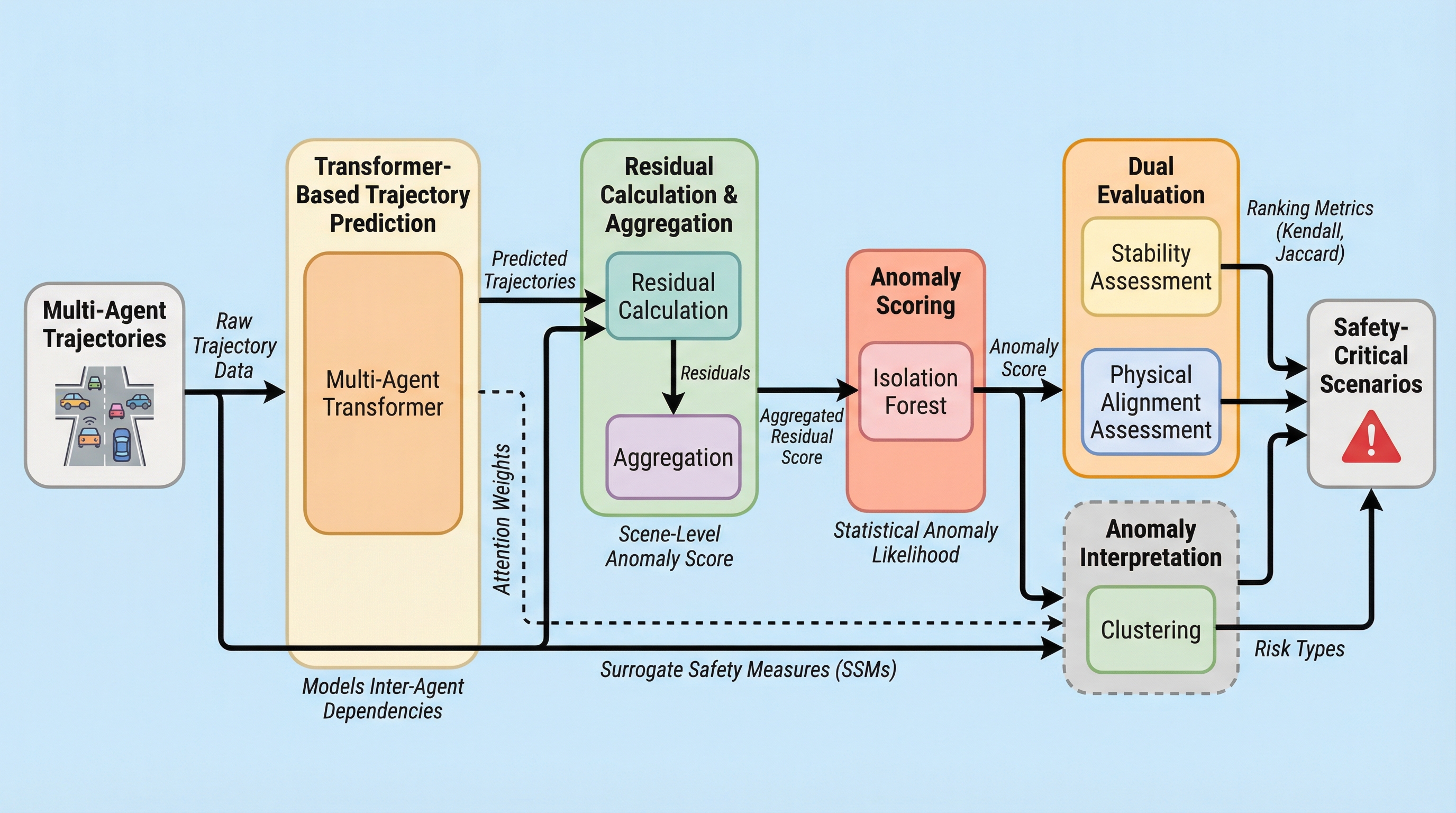
自動運転の安全性評価において、稀にしか発生しない危険なシナリオを効率的に特定するため、マルチエージェント間の複雑な相互作用を考慮できるTransformerベースの教師なし異常検知フレームワークを開発し、ラベルのない大規模な自然運転データから物理的な意味を持つリスクを抽出する手法を確立しました。 提案手法は、正常な運転行動を学習したモデルの予測残差を異常信号として利用し、検出結果の安定性を測るランキング指標と、衝突時間(TTC)などの物理的な安全指標との整合性を測る二重評価スキームを導入することで、統計的な偏差が実際の交通リスクをどの程度反映しているかを体系的に検証可能にしています。 米国高速道路のNGSIMデータセットを用いた検証では、既存のルールベース手法や統計的ベースラインが見逃していた388件の特有な異常シーンを特定し、それらを「追従の不安定性」や「急な車線変更」といった4つの解釈可能なリスクタイプに分類することで、シミュレーションやテストに直結する具体的な知見を提供することに成功しました。
なぜこの問題か
自動運転車両の安全性を検証する上で、衝突や急ブレーキといった安全性に直結するシナリオを特定することは不可欠ですが、こうしたイベントは自然な運転データの中では極めて稀にしか発生しません。この希少性の問題は「希少性の呪い」と呼ばれており、教師あり学習に必要なラベル付きデータを十分に収集することを実質的に不可能にしています。自然な運転データは極めて不均衡であり、何百万マイルもの走行データの中にわずかな危険イベントが含まれるに過ぎないため、手動でのラベル付けはコストと時間の面で現実的ではありません。また、従来の安全性指標である衝突時間(TTC)や衝突回避のための減速度(DRAC)、停止距離の割合(PSD)といったルールベースの手法は、計算が簡便で解釈性が高いという利点があるものの、基本的には2台の車両間の単純な相互作用のみに限定されています。 そのため、複数のエージェントが複雑に絡み合う交通環境における潜在的なリスクを十分に捉えることができず、固定された閾値による判定は未知の不安全な行動に対して汎用性を欠くという課題がありました。…
核心:何を提案したのか
本研究では、マルチエージェント間の相互作用を明示的にモデル化し、統計的な一貫性と物理的なリスク指標との整合性の両方を評価する、Transformerベースの教師なし異常検知フレームワークを提案しました。このフレームワークの核心は、マルチエージェントTransformerを用いて「正常な運転行動」を学習させ、実際の軌道と予測された軌道の間の残差(予測誤差)を偏差信号として利用して異常スコアを算出する点にあります。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related