未知の力学系における一般化された情報収集フレームワーク
未知の力学系で作動するエージェントが、特定のモデルや更新手法に依存せずに効率的な学習を行うための、因果関係を明示した一般化された情報収集フレームワークを提案しています。この枠組みは、パラメータ、信念、制御、状態、観測の間の複雑な依存関係を因果グラフによって整理し、学習と計画のプロセスを完全に分離して設計することを可能にします。 マッセイの有向情報量に基づいた新しいコスト関数を導入し、従来の相互情報量を用いる手法が特定の条件下における特殊なケースであることを数学的に証明することで、既存手法に理論的な正当性を与えました。これにより、ガウス過程やニューラルネットワークなど、異なるモデル構造を採用した場合でも、統一的な数理基盤の上で最適な情報収集行動を導出できます。 この枠組みは、線形・非線形システムやマルチエージェント環境において、学習アルゴリズムと計画アルゴリズムを柔軟に組み合わせることを可能にし、未知の他者に関する情報の能動的な取得を容易にします。実験では、自律走行車が他者の意図を推定するシナリオなどを通じて、提案手法が多様なタスクにおいて一貫した性能を発揮し、システムの安全性を高めることを実証しました。
TL;DR(結論)
未知の力学系で作動するエージェントが、特定のモデルや更新手法に依存せずに効率的な学習を行うための、因果関係を明示した一般化された情報収集フレームワークを提案しています。この枠組みは、パラメータ、信念、制御、状態、観測の間の複雑な依存関係を因果グラフによって整理し、学習と計画のプロセスを完全に分離して設計することを可能にします。 マッセイの有向情報量に基づいた新しいコスト関数を導入し、従来の相互情報量を用いる手法が特定の条件下における特殊なケースであることを数学的に証明することで、既存手法に理論的な正当性を与えました。これにより、ガウス過程やニューラルネットワークなど、異なるモデル構造を採用した場合でも、統一的な数理基盤の上で最適な情報収集行動を導出できます。 この枠組みは、線形・非線形システムやマルチエージェント環境において、学習アルゴリズムと計画アルゴリズムを柔軟に組み合わせることを可能にし、未知の他者に関する情報の能動的な取得を容易にします。実験では、自律走行車が他者の意図を推定するシナリオなどを通じて、提案手法が多様なタスクにおいて一貫した性能を発揮し、システムの安全性を高めることを実証しました。
なぜこの問題か
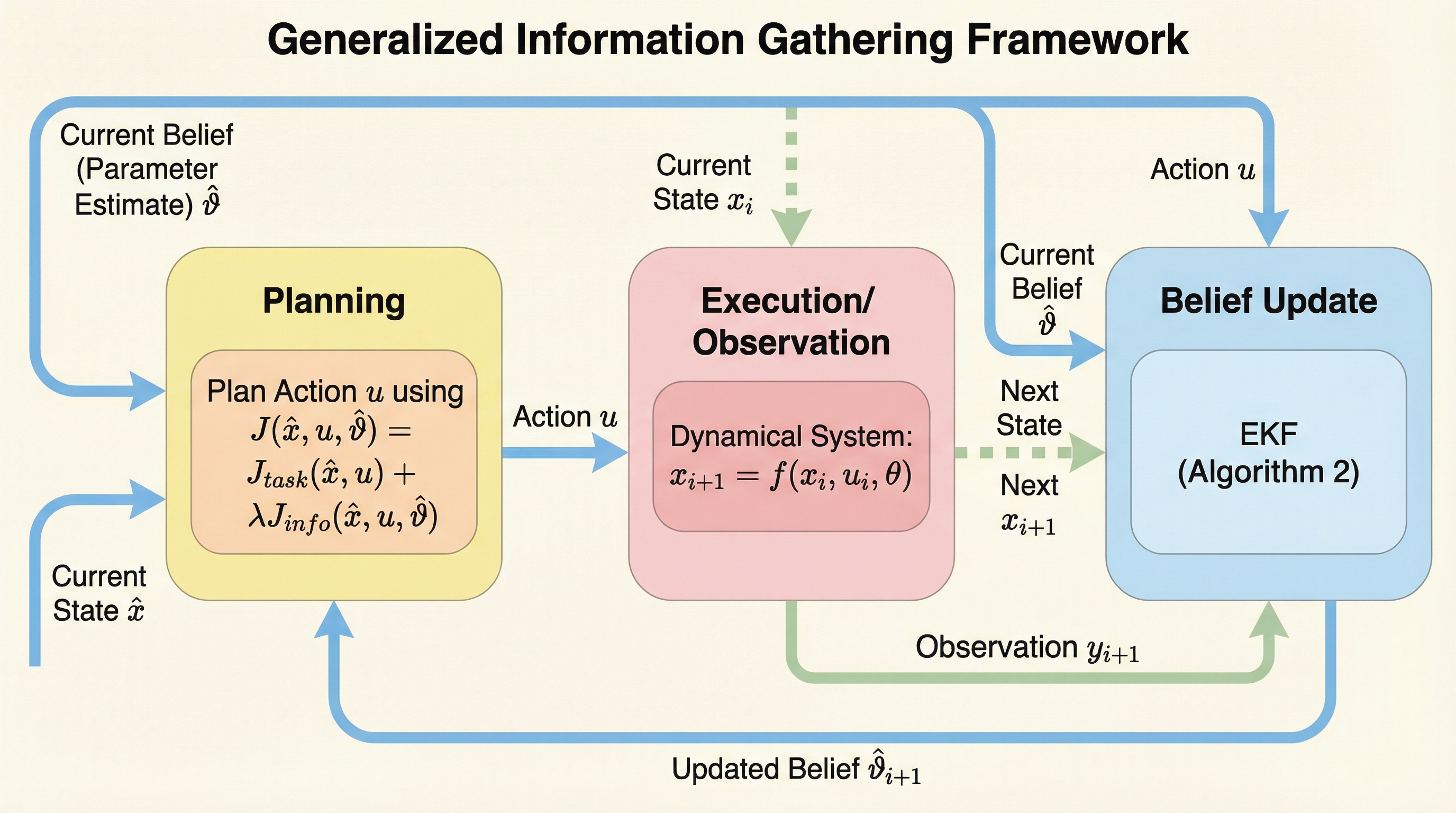
未知の力学系においてエージェントが適切に機能するためには、観測データからそのシステムの特性を学習する必要があります。この学習プロセスは、単にデータを受け取るだけの受動的なものよりも、より情報密度の高い観測を求めて行動する能動的な情報収集の方が、探索における時間やエネルギー、リスクを削減できるため重要です。しかし、この能動的な情報収集には大きく分けて二つの困難が存在すると著者らは指摘しています。 第一に、将来の行動によって不確実性がどのように変化するかを計算するためには、複雑にネストされた期待値を評価しなければならないという計算上の課題があります。将来の不確実性を予測するには、将来の観測がどのようになり、それによって自分の信念がどう更新されるかをシミュレーションしなければならず、これは非常に高い計算負荷を伴います。 第二に、既存の定式化では、信念、制御、状態の間の因果的な依存関係が明確に整理されていないという構造上の課題があります。その結果、これまでの研究手法は、特定の力学系モデル、信念の更新手順、観測モデル、あるいはプランナーといった個別の設計選択に特化した、いわば「一点もの」のコスト関数に依存せざるを得ませんでした。…
核心:何を提案したのか
本論文の最大の貢献は、パラメータ、信念、制御、状態、観測、そして予測された信念の間の因果的依存関係をクリーンに露出させた、モジュール性の高い新しいフレームワークの提案です。このフレームワークは、特定の力学系モデル(ガウス過程、物理ベースモデル、ニューラルネットワークなど)や、特定の信念更新手順(カルマンフィルタ、粒子フィルタ、オンライン勾配降下…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related