安全なAI自律制御のためのコンテキスト対応ランタイムモニター学習
機械学習ベースの制御器は未知の環境において性能が急激に低下し、自律システムの安全性を脅かすという深刻な課題を抱えているが、本研究では複数の制御器の中から現在の環境状況(コンテキスト)に応じて最適なものを選択する「コンテキスト対応ランタイムモニター」を提案し、この問題を解決する。
TL;DR(結論)
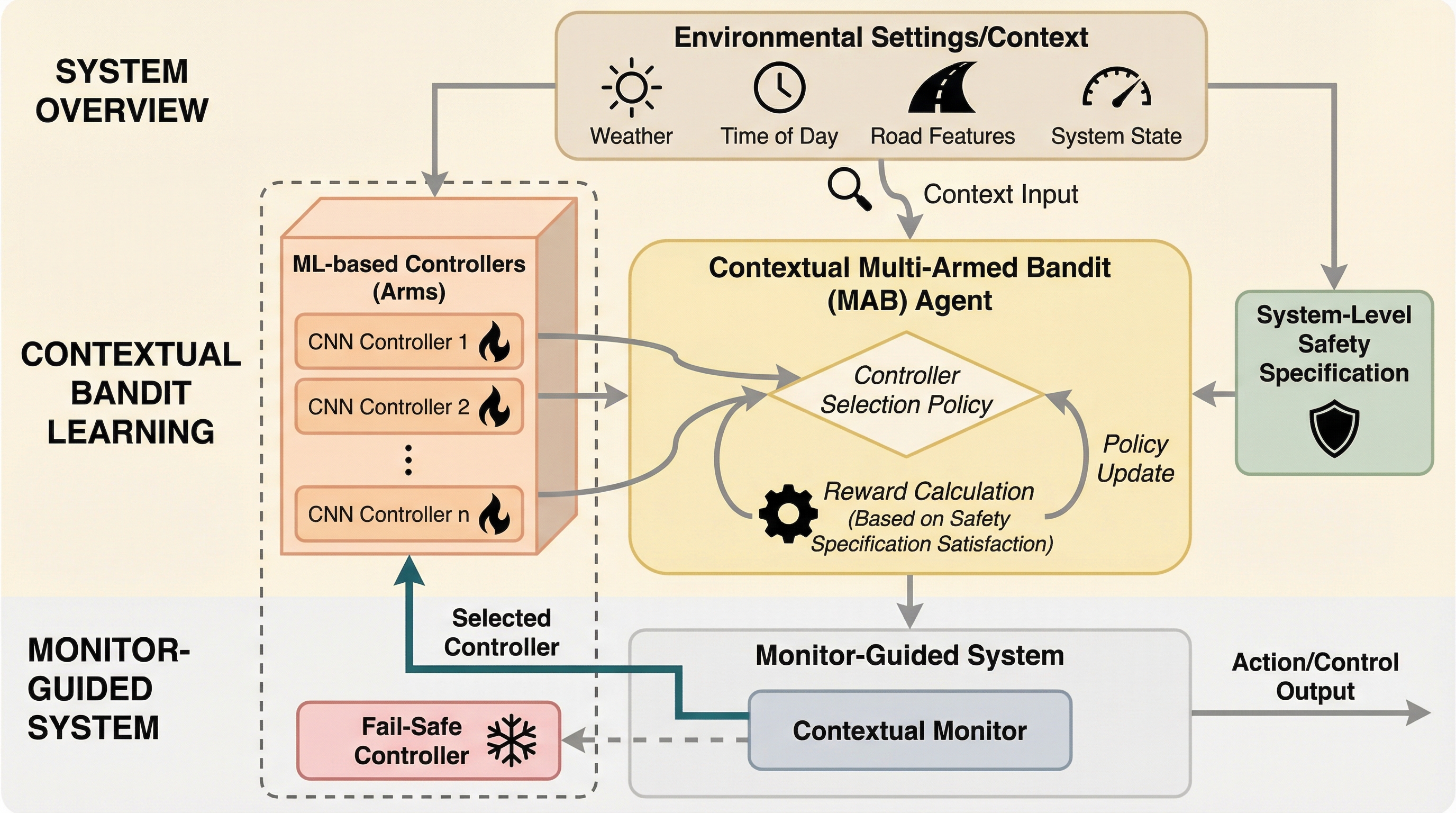
機械学習ベースの制御器は未知の環境において性能が急激に低下し、自律システムの安全性を脅かすという深刻な課題を抱えているが、本研究では複数の制御器の中から現在の環境状況(コンテキスト)に応じて最適なものを選択する「コンテキスト対応ランタイムモニター」を提案し、この問題を解決する。 従来のアンサンブル手法のように複数の出力を平均化して個々の専門性を薄めるのではなく、コンテキスト付き多腕バンディット問題として定式化することで、各制御器の得意分野を最大限に活用し、信頼できる制御器がない場合には安全性が検証済みのフェイルセーフへと動的に切り替える仕組みを構築した。 自動運転のシミュレーションを用いた検証の結果、提案手法は非コンテキスト的な従来手法と比較して安全性と性能の両面で大幅な向上を達成しており、さらに理論的なリグレット最小化に基づく統計的な安全性の保証を提供することで、AIを搭載したサイバーフィジカルシステムの信頼性を飛躍的に高めることに成功した。
なぜこの問題か
近年、機械学習(ML)ベースのモデル、特にニューラルネットワークは、認識や計画、制御といった極めて複雑な意思決定タスクを解決する能力を持っているため、自律型サイバーフィジカルシステム(ACPS)への導入が急速に進んでいる。しかし、これらの機械学習モデルは本質的に脆弱であり、学習時とは異なる予期せぬ環境の変化に直面すると、その性能が急激に低下し、システムの安全性を根本から脅かすような誤った結果を招く可能性がある。この脆弱性は、使用される学習アルゴリズムやモデルのアーキテクチャ、あるいは学習データの偏りといった多種多様な要因に起因している。 不確実性を軽減するための一般的なアプローチとして、複数のモデルの予測を組み合わせてより堅牢な出力を生成するアンサンブル手法が存在する。しかし、従来のアンサンブル手法の多くは、平均化や多数決といったメカニズムに依存しており、個々の制御器が特定の動作コンテキストにおいて発揮するはずの専門的な強みを薄めてしまうという欠点がある。…
核心:何を提案したのか
本研究では、AIベースの制御アンサンブルの設計を「コンテキスト対応モニタリング問題」として再定義し、新しい学習フレームワークを提案した。このフレームワークの最大の特徴は、すべての制御器の出力を一律に混合するのではなく、現在の動作コンテキスト(環境条件やシステムの状態など)に基づいて、どの制御器を配備するのが最も安全であるかをリアルタイムで判断する点にある。モニターは継続的にシステムのコンテキストを観察し、個々の制御器が持つコンテキスト上の専門知識を特定して活用する役割を担う。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related