物理法則に基づく4次元大気風速場の再構成:マルチドローン群観測を活用して
1. 複数の無人航空機システム(UAS)の群れを活用し、専用の風速センサーを搭載することなく機体の動的応答のみから局所的な風速を推定し、時間と空間の4次元で大気風速場を再構成する革新的なフレームワークを提案した。 2.
TL;DR(結論)
- 複数の無人航空機システム(UAS)の群れを活用し、専用の風速センサーを搭載することなく機体の動的応答のみから局所的な風速を推定し、時間と空間の4次元で大気風速場を再構成する革新的なフレームワークを提案した。
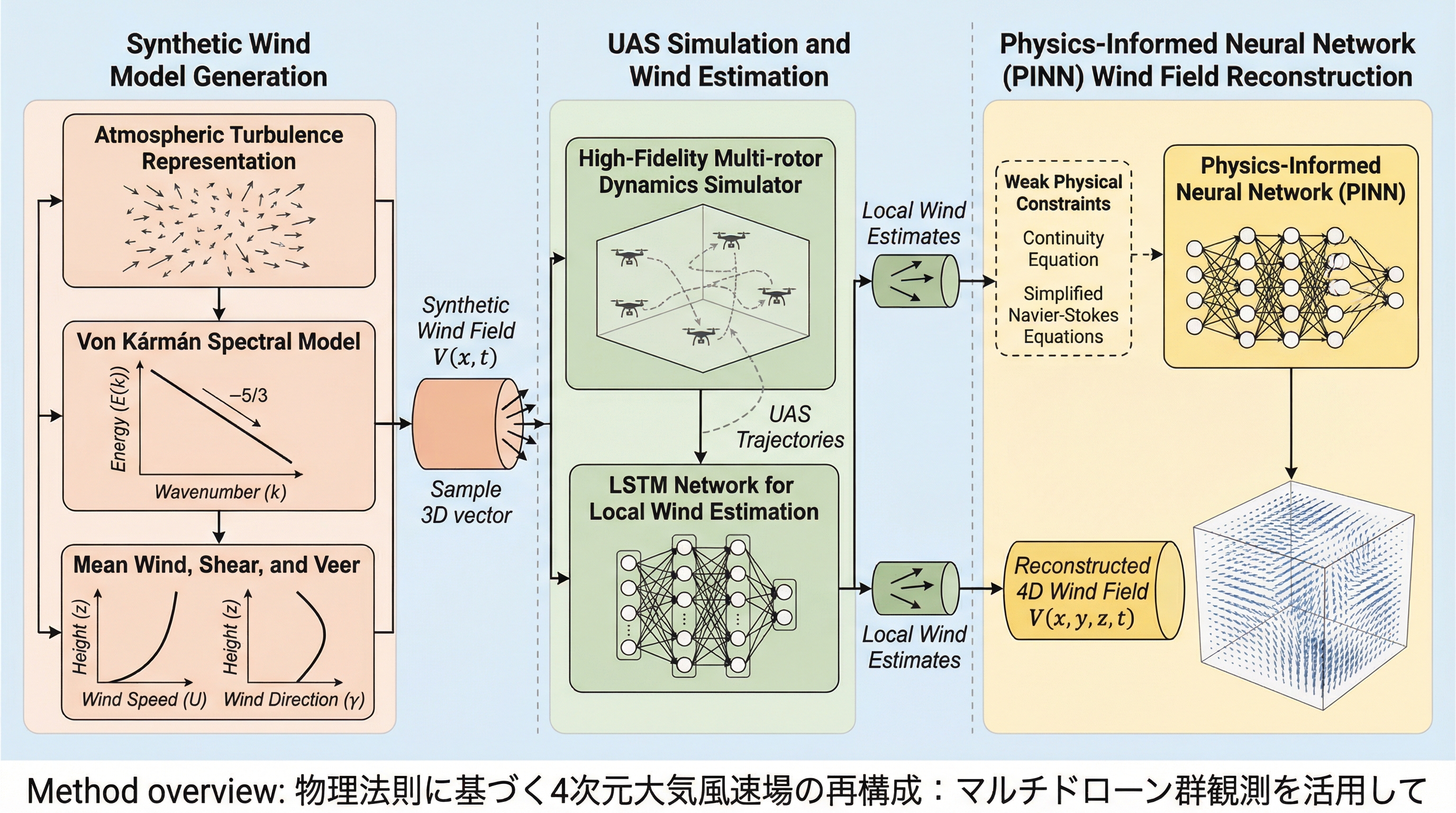
- 双方向長短期記憶ネットワーク(Bi-LSTM)を用いて機体挙動から風速成分を導出し、その推定値を物理法則に基づくニューラルネットワーク(PINN)に統合することで、高度1000メートルに及ぶ大気境界層内の連続的な風速構造を高い精度で復元することに成功した。
- 合成された乱流環境下での検証により、5機のUAS構成で最も低い平均誤差(RMSE 0.118 m/s)を達成し、従来の固定式観測機器や高価なリモートセンシングでは解消できなかった時空間的な観測の空白を、柔軟かつ低コストな群観測によって補完できる可能性を実証した。
なぜこの問題か
大気風速場が空間や時間とともにどのように変化するかを正確に理解することは、数値天気予報、嵐の被害評価、風力エネルギーの評価など、幅広い大気科学および工学アプリケーションにとって極めて重要である。特に強い風が頻繁に発生する地域は、激しい嵐や竜巻などの影響を受けやすく、公共の安全とインフラ計画の両面で風速場の正確な特性評価が求められている。しかし、既存の観測手段には大きな制約が存在する。ドップラー風速リレーダー(DWL)や気象タワー、風速計などは貴重なデータを提供するが、配備コストや運用上の制約があり、高度数百メートルを超えると観測範囲が急速に減少してしまう。その結果、下層大気境界層(ABL)の大部分は、空間的および時間的な観測データがまばらな状態に留まっている。 無人航空機システム(UAS)は、高解像度の現地観測を低コストかつ柔軟に提供できる補完的なプラットフォームとして注目されている。しかし、単一のUASによる観測は飛行軌道上に限定されるため、機体周辺の広範な3次元構造を明らかにすることは困難である。…
核心:何を提案したのか
本研究の核心は、協調するUASの群れから得られる測定値のみに依存し、空間(x, y, z)と時間(t)の関数として完全な4次元風速場を再構成する新しいフレームワークを提案したことにある。このフレームワークは、合成大気乱流環境、高忠実度のマルチローター動力学シミュレーター、局所風速推定のための双方向長短期記憶ネットワーク(Bi-LSTM)、および物理法則に基づくニューラルネットワーク(PINN)の4つの主要要素を統合している。最大の特徴は、各UASが専用の風速センサーを一切必要とせず、大気の乱れに対する機体固有の動的応答のみから局所的な風速を推論する点にある。これにより、特殊な計測機器が利用できない環境や、従来のインフラが整っていない場所でも風速場の再構成が可能になる。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related