未知の力学系における一般化された情報収集フレームワーク
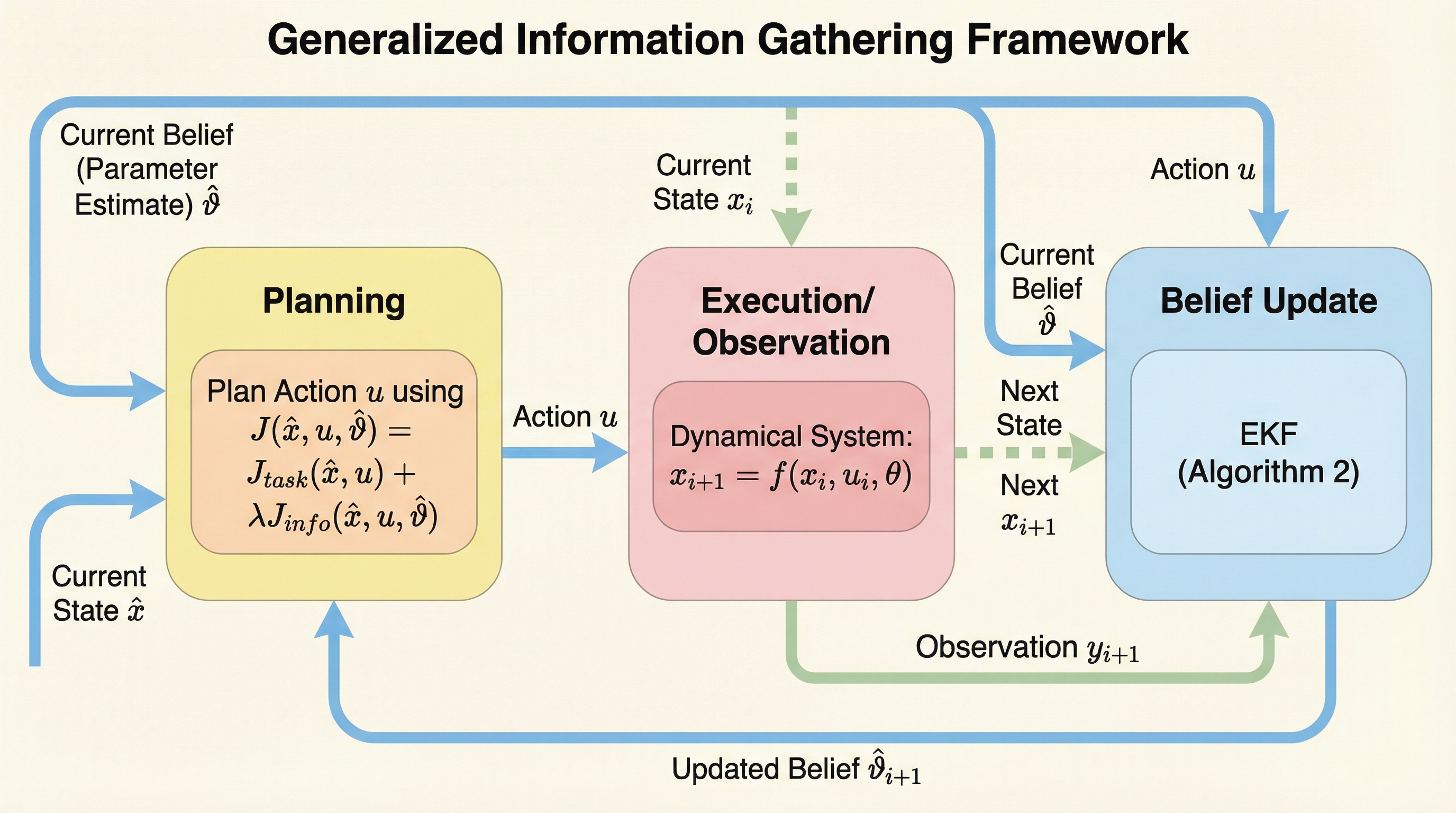
未知の力学系で作動するエージェントが、特定のモデルや更新手法に依存せずに効率的な学習を行うための、因果関係を明示した一般化された情報収集フレームワークを提案しています。この枠組みは、パラメータ、信念、制御、状態、観測の間の複雑な依存関係を因果グラフによって整理し、学習と計画のプロセスを完全に分離して設計することを可能にします。 マッセイの有向情報量に基づいた新しいコスト関数を導入し、従来の相互情報量を用いる手法が特定の条件下における特殊なケースであることを数学的に証明することで、既存手法に理論的な正当性を与えました。これにより、ガウス過程やニューラルネットワークなど、異なるモデル構造を採用した場合でも、統一的な数理基盤の上で最適な情報収集行動を導出できます。 この枠組みは、線形・非線形システムやマルチエージェント環境において、学習アルゴリズムと計画アルゴリズムを柔軟に組み合わせることを可能にし、未知の他者に関する情報の能動的な取得を容易にします。実験では、自律走行車が他者の意図を推定するシナリオなどを通じて、提案手法が多様なタスクにおいて一貫した性能を発揮し、システムの安全性を高めることを実証しました。