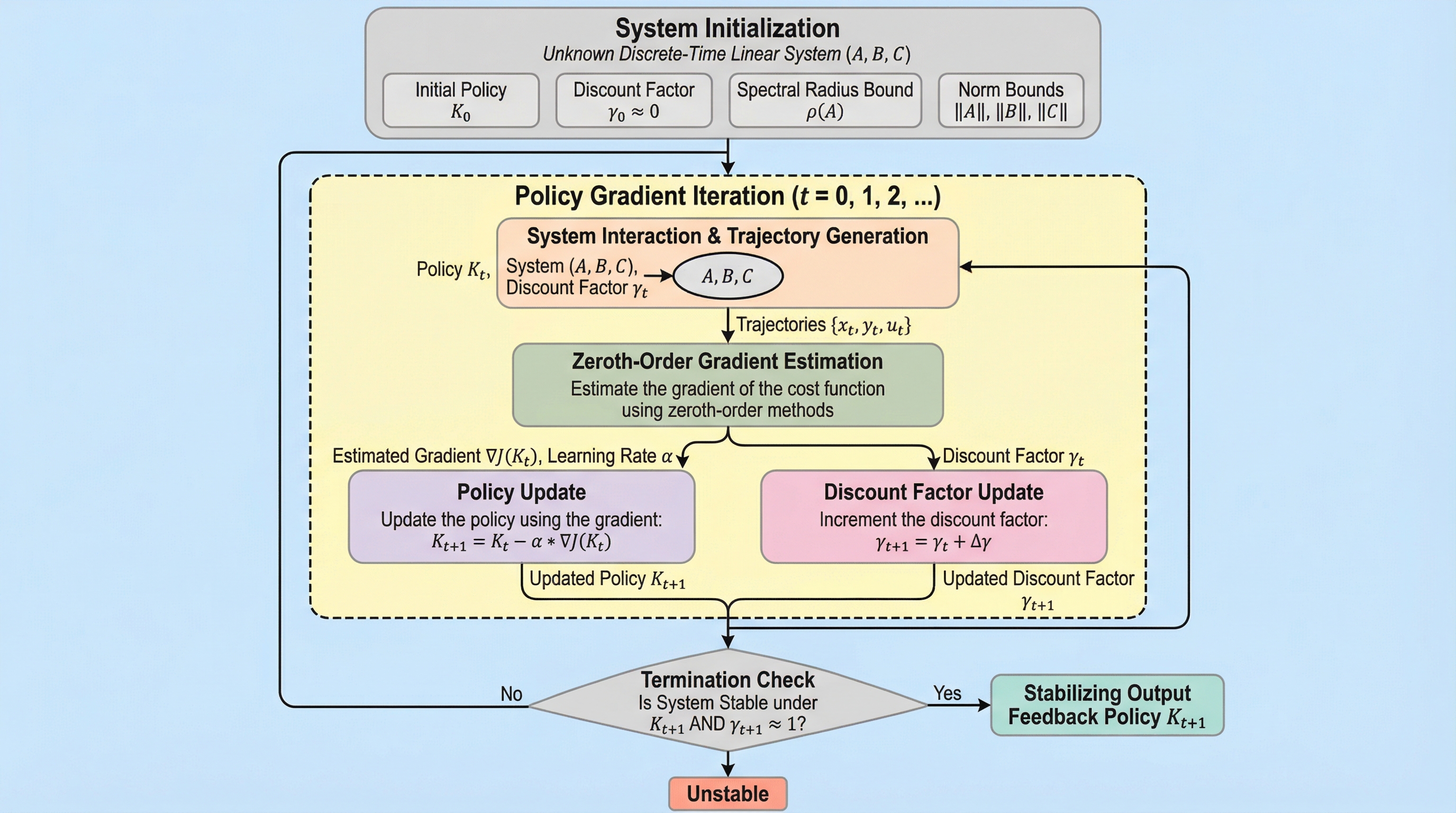
方策勾配法を用いた線形システムの出力フィードバック安定化
本研究は、システムモデルが未知である離散時間線形動的システムにおいて、観測可能な出力情報のみを利用してシステムを安定化させるための新しいモデルフリーな方策勾配法を提案している。従来の全状態フィードバックを前提とした手法とは異なり、出力フィードバック特有の非凸性や勾配優位性の欠如という困難に対し、割引因子を段階的に調整する「割引法」と零次最適化を組み合わせることで、開ループで不安定なシステムを確実に安定化領域へと導く。提案アルゴリズムは、システムの実行軌道データから勾配を推定する二点推定法を採用しており、非凸な最適化環境下での停留点への収束保証とともに、安定化に必要な総サンプル複雑性を理論的に明示し、数値シミュレーションによってその有効性を実証している。