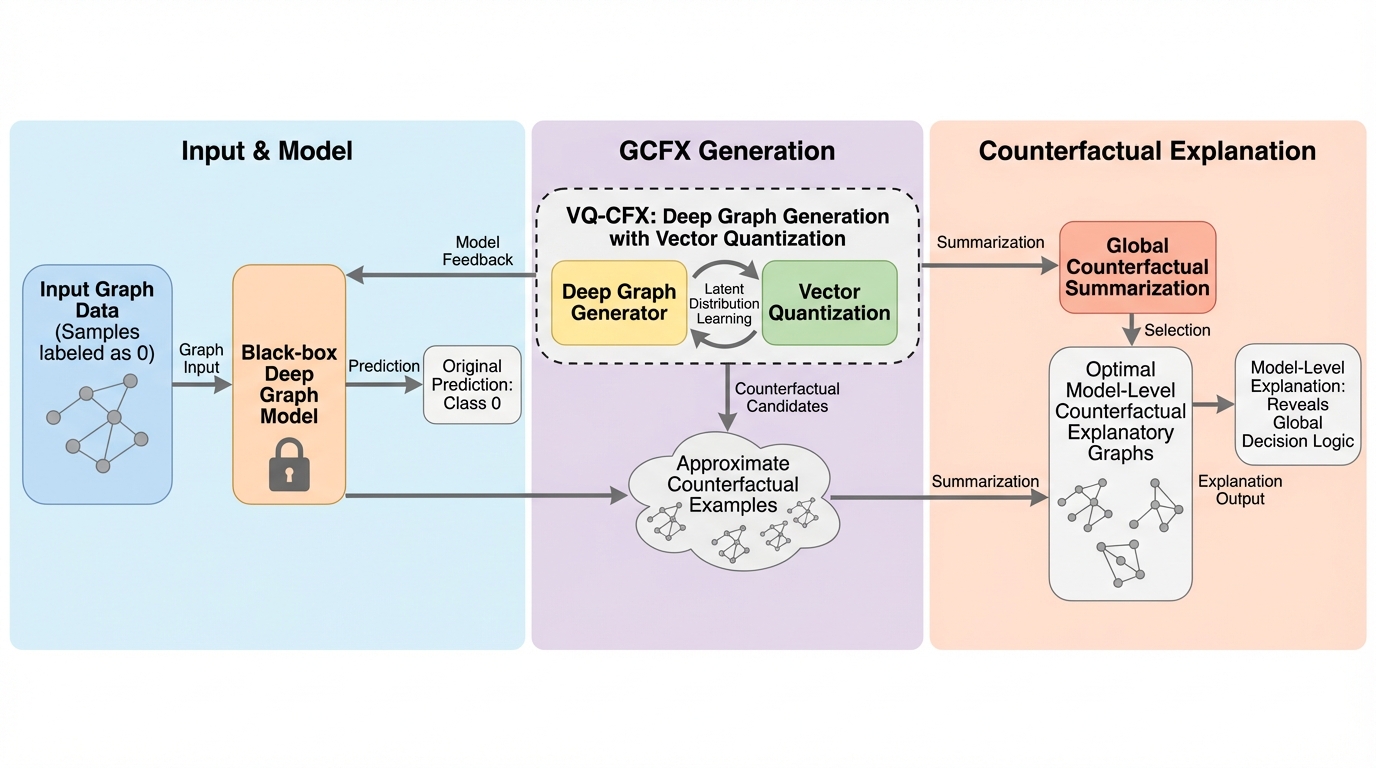
GCFX:モデルレベルにおける深層グラフモデルの生成的反事実説明
深層グラフ学習モデルの意思決定プロセスを全体的に把握するため、モデルレベルの反事実説明手法であるGCFXが提案されました。この手法は、ベクトル量子化を用いた生成モデルVQ-CFXによって高品質な反事実候補を生成し、要約アルゴリズムGCFSによって代表的かつ多様な説明セットを選択する二段構えの構成をとっています。
最新の論文記事を読みやすく整理。保存・タグ検索に加え、Plus/Proでは研究ノートと知識グラフで理解を積み上げられます。
Cog AI Archive
深層グラフ学習モデルの意思決定プロセスを全体的に把握するため、モデルレベルの反事実説明手法であるGCFXが提案されました。この手法は、ベクトル量子化を用いた生成モデルVQ-CFXによって高品質な反事実候補を生成し、要約アルゴリズムGCFSによって代表的かつ多様な説明セットを選択する二段構えの構成をとっています。
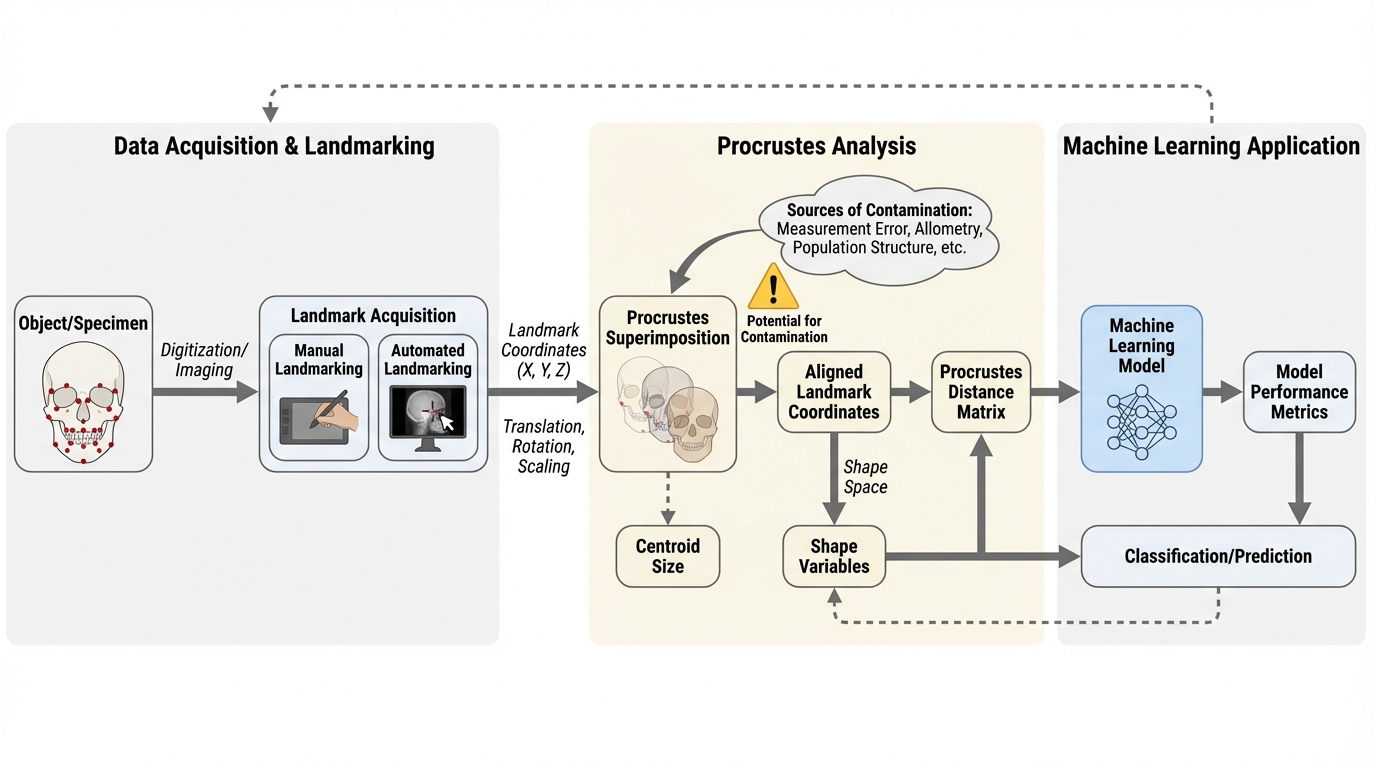
幾何学的形態測定学(GMM)を機械学習に統合する際、データ分割前に全標本を一括で整列させる標準的な一般化プロクラステス解析(GPA)が、訓練データとテストデータの間に不適切な統計的依存関係を生じさせ、予測精度を不当に高く見積もる「プロクラステス汚染」を引き起こすことを数学的・実験的に解明しました。
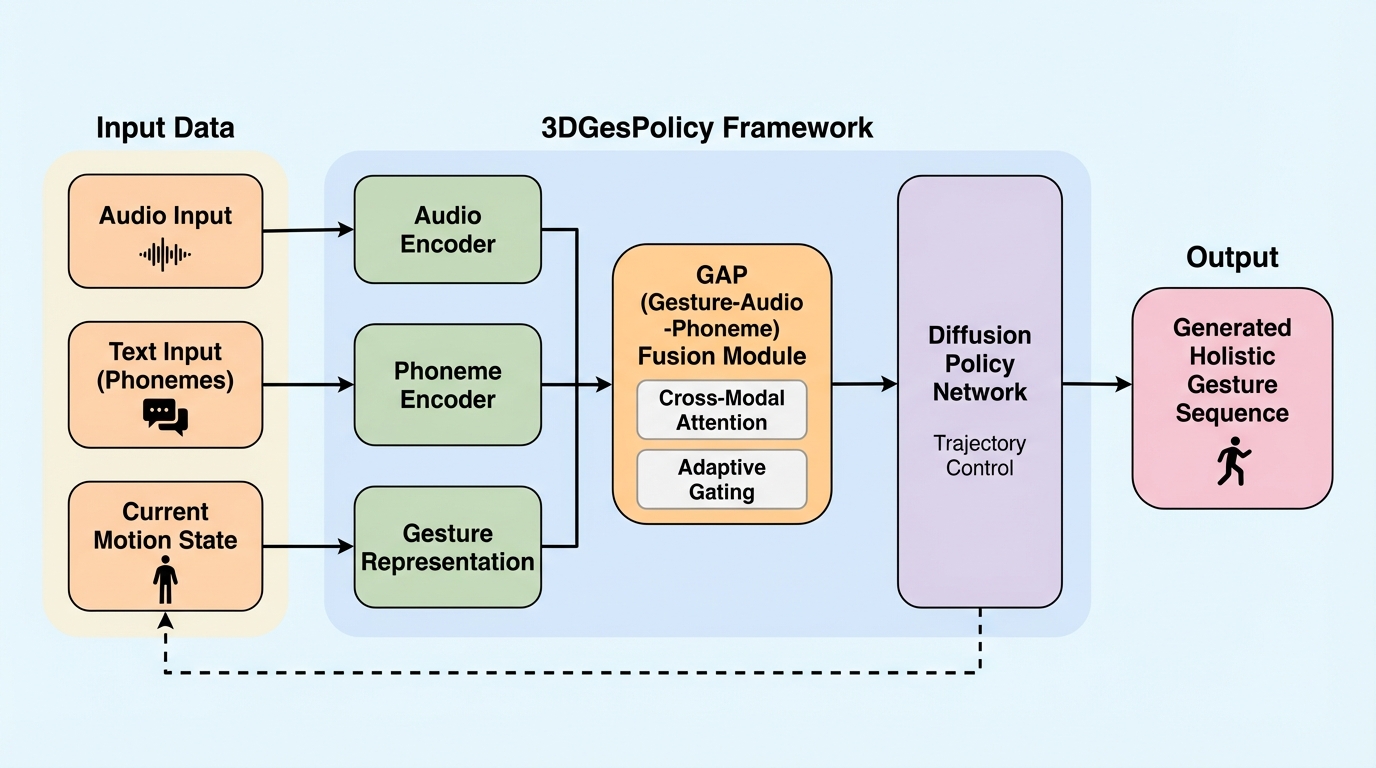
本研究は、ロボット工学の拡散ポリシー(Diffusion Policy)を応用し、全身の動きと顔の表情を統合的に生成する新しいフレームワーク「3DGesPolicy」を提案した。従来のフレーム単位の回帰や部位分解手法が抱えていた、空間的な不安定さや意味的な不整合という課題を解決するため、ジェスチャー生成を「連続的な軌道制御問題」として再定義し、フレーム間の変化を統一された「アクション」としてモデル化している。さらに、音素レベルの言語情報と音響特徴を高度に融合させるGAP(Gesture-Audio-Phoneme)モジュールを導入することで、発話内容と身体動作、唇の動きが精密に同期した、自然で表現力豊かなデジタルヒューマンの挙動を実現し、BEAT2データセットにおいて既存の最先端手法を上回る性能を実証した。
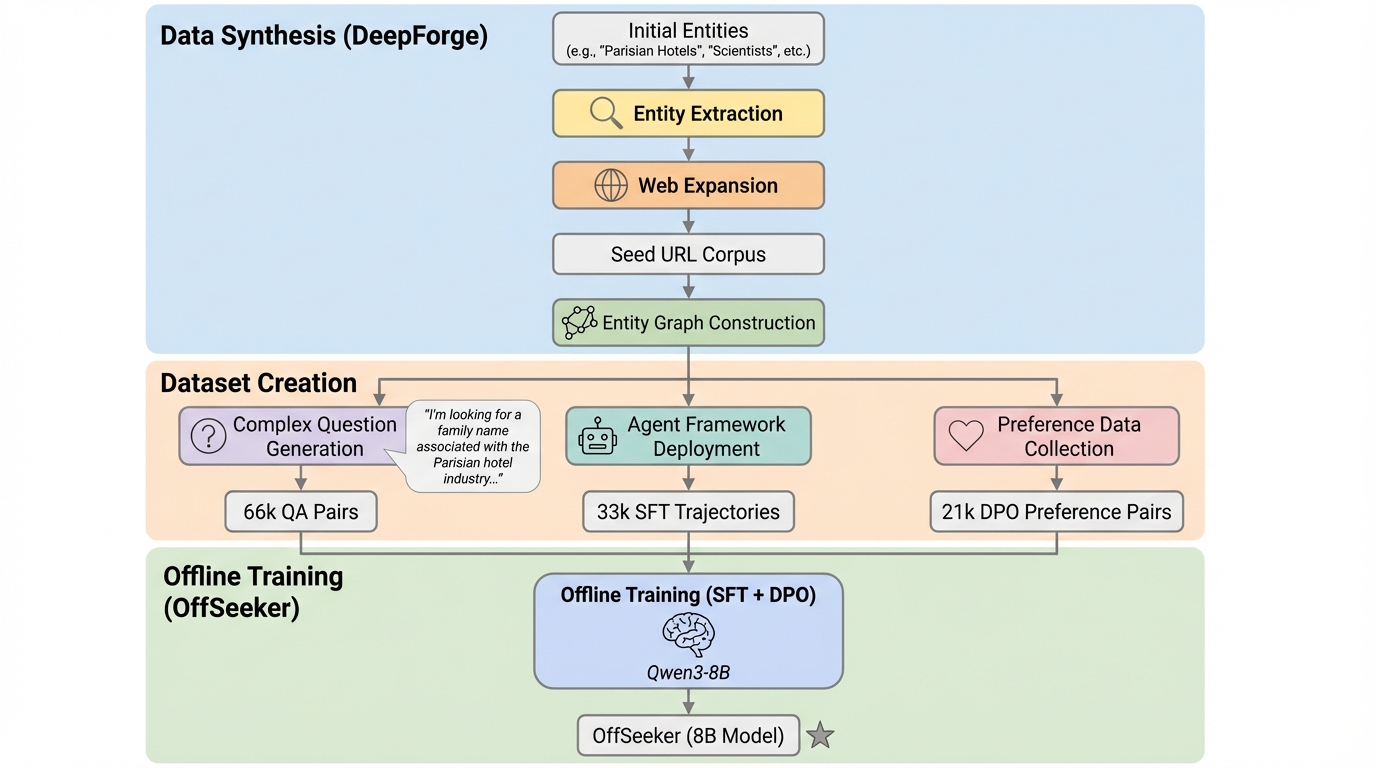
現在の最先端なディープリサーチエージェントの開発において主流となっている、高額なAPI費用と学習の不安定さを伴うオンライン強化学習に依存せず、高品質なオフライン学習のみで高性能なモデルを構築できることを実証しました。
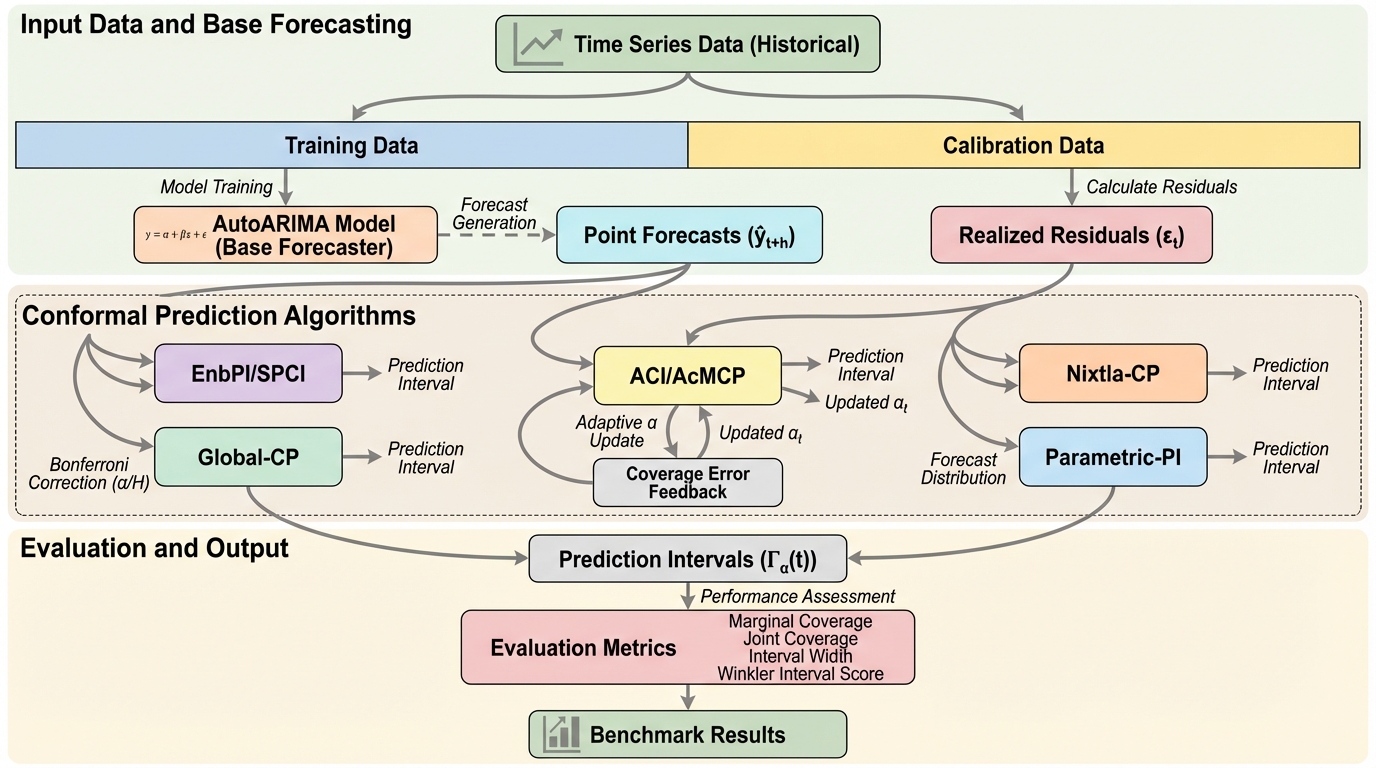
現代の意思決定において将来の不確実性を定量化する予測区間の重要性が高まっていますが、従来のコンフォーマル予測はデータの順序を入れ替えても分布が変わらない「交換可能性」を前提としており、時間の依存関係を持つ時系列データへの適用には課題がありました。
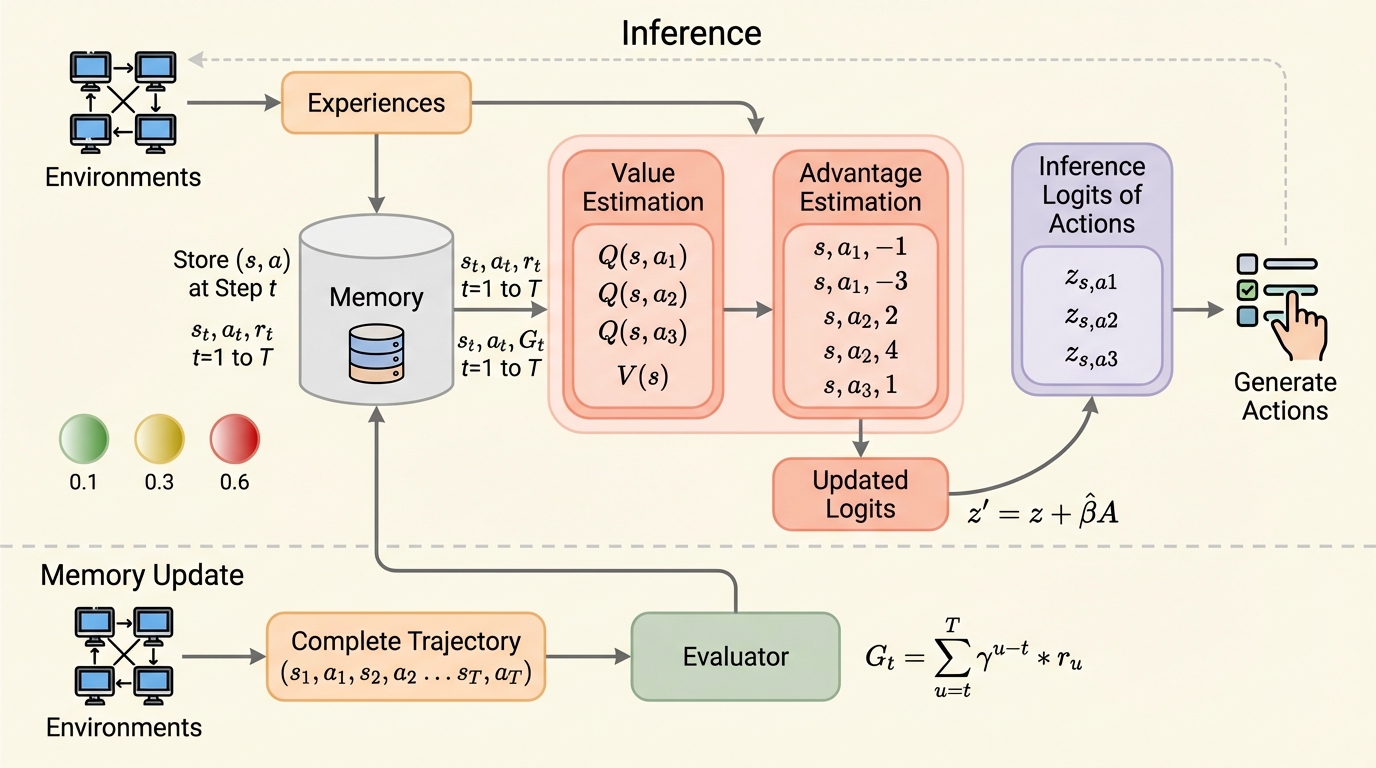
大規模言語モデル(LLM)エージェントがデプロイ後に新しい環境へ適応できないという「重みの固定」問題を解決するため、勾配更新を一切行わずに推論時に方策を最適化する「Just-In-Time Reinforcement Learning(JitRL)」が提案されました。
都市全体の広大なバスネットワークを対象とした、極めてスケーラブルな遅延予測パイプラインを構築し、1,683個に及ぶ多解像度の時空間特徴量を自動生成した上で、適応型主成分分析(Adaptive PCA)を活用して情報の95%を保持しつつ83成分まで劇的に圧縮することに成功した。
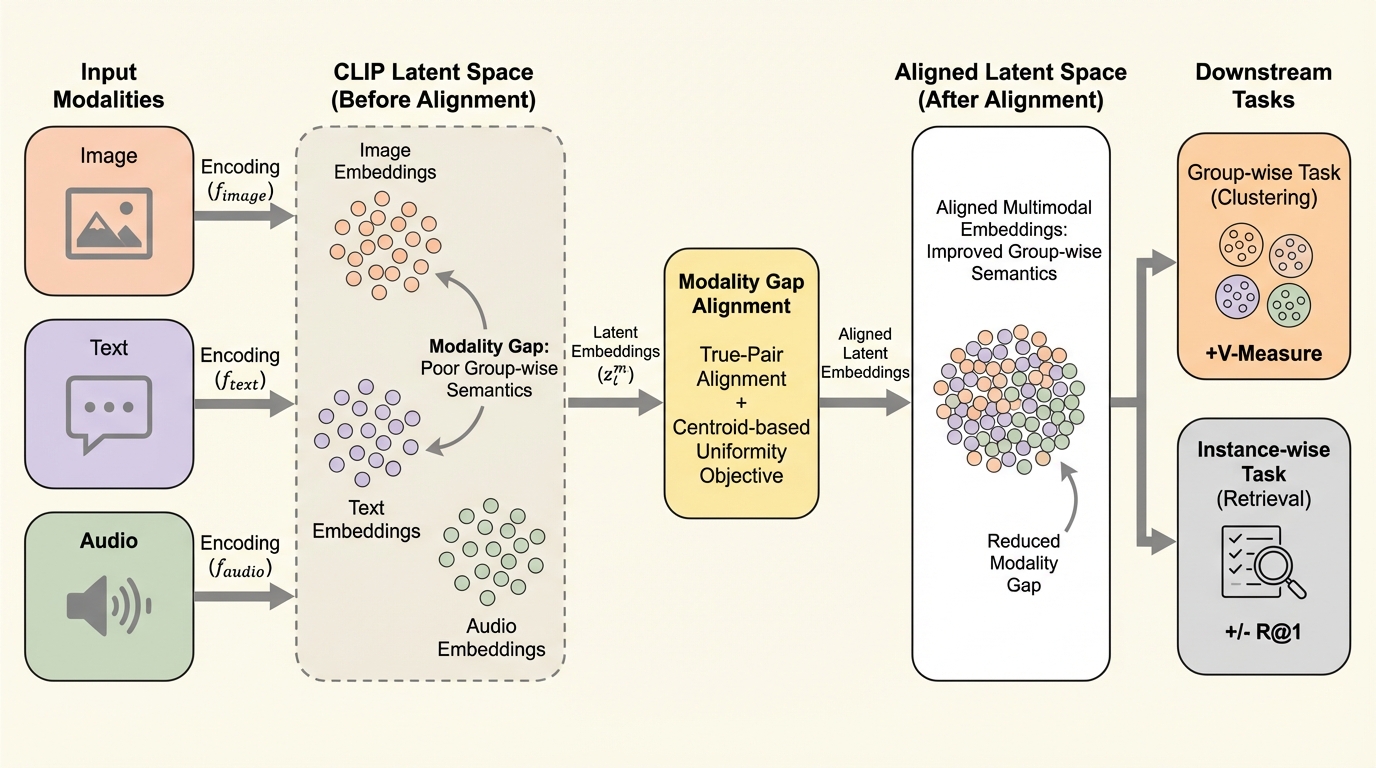
マルチモーダル学習の標準手法であるCLIPにおいて、異なるデータ形式(画像やテキスト等)が潜在空間内で分離してしまう「モダリティ・ギャップ」が、クラスタリングなどのグループ単位のタスク性能を著しく低下させていることを解明した。
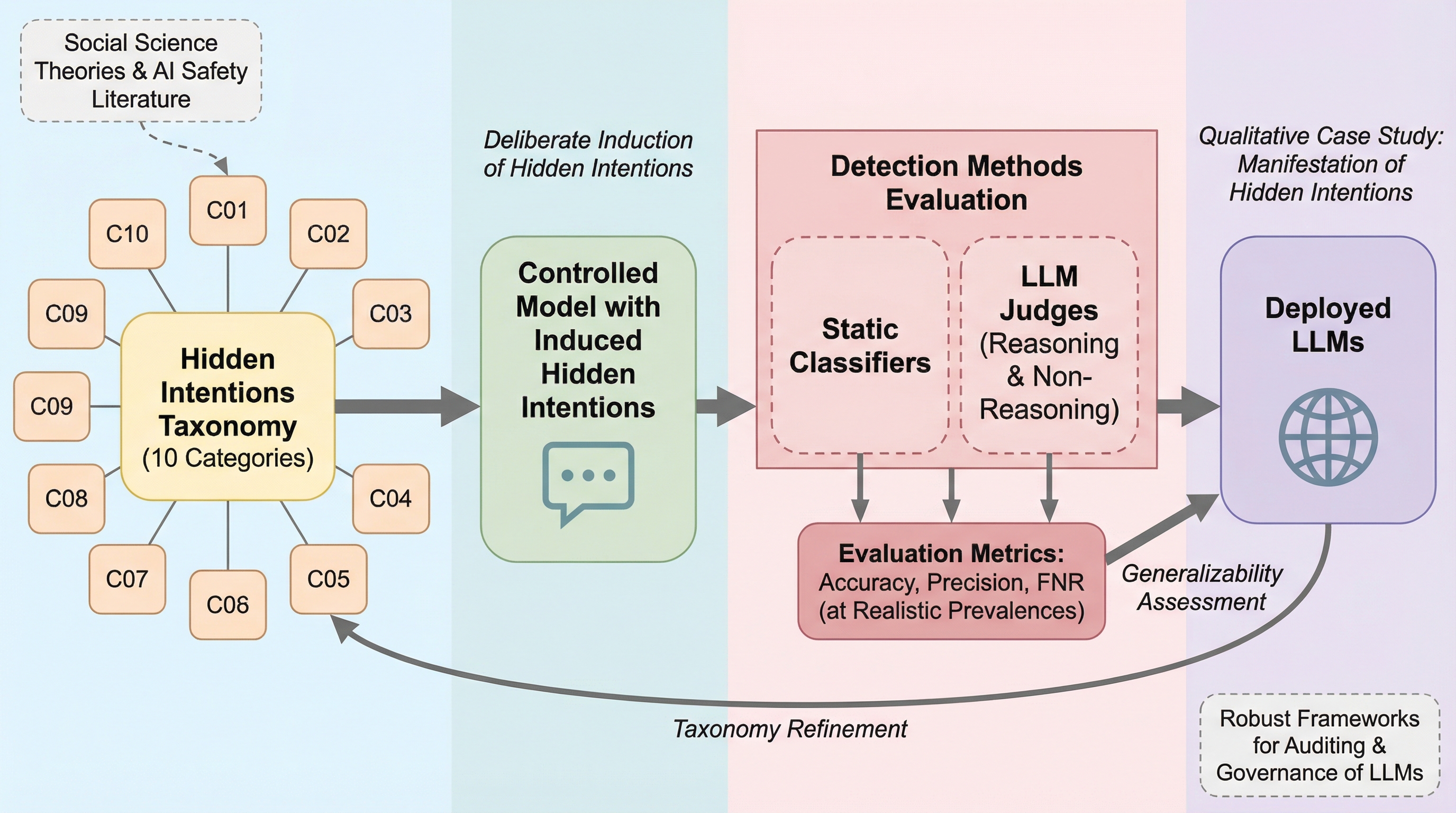
大規模言語モデル(LLM)には、ユーザーの信念や行動を密かに誘導する「隠された意図」が存在し、これらは訓練プロセスや悪意ある開発者によって埋め込まれる可能性がある。本研究では、社会科学の知見に基づき、戦略的な曖昧さや感情的操作を含む10個のカテゴリからなる分類法を提案し、制御された環境でこれらの意図を意図的に誘発するテストベッドを構築した。検証の結果、既存の検出手法は現実的な運用環境、特に隠された意図の発生頻度が低い状況において精度が著しく低下し、偽陽性の増大や重大なリスクの見逃しが発生することが明らかになった。
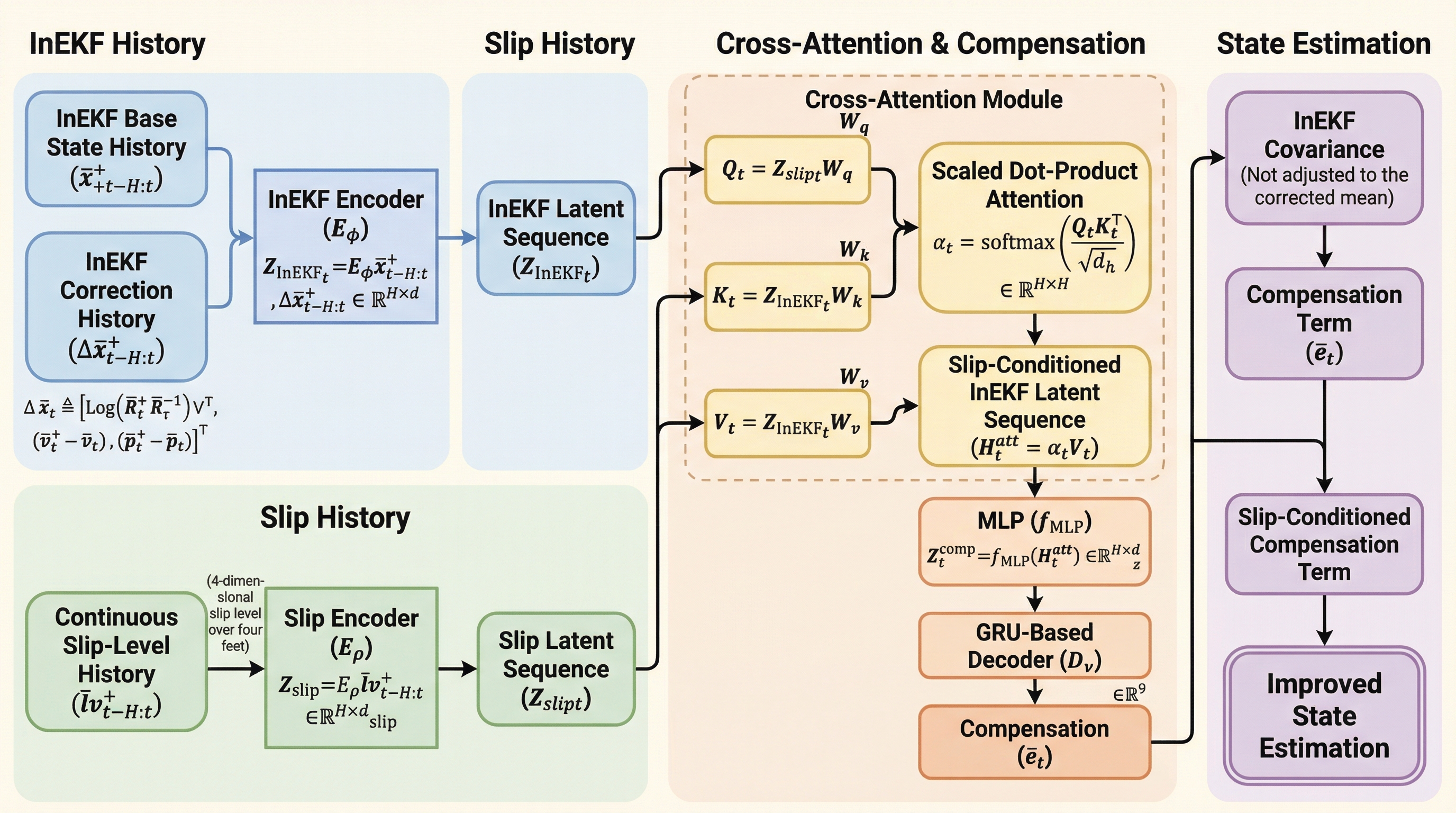
脚式ロボットの歩行中に発生する「足の滑り」は、運動学的な仮定を崩し推定誤差を増大させる主因となるが、本研究では不変拡張カルマンフィルタ(InEKF)にアテンション機構を用いたニューラル補正器を統合した「AttenNKF」を提案した。