脚式ロボットの状態推定のためのアテンションに基づくニューラル拡張カルマンフィルタ
脚式ロボットの歩行中に発生する「足の滑り」は、運動学的な仮定を崩し推定誤差を増大させる主因となるが、本研究では不変拡張カルマンフィルタ(InEKF)にアテンション機構を用いたニューラル補正器を統合した「AttenNKF」を提案した。
TL;DR(結論)
脚式ロボットの歩行中に発生する「足の滑り」は、運動学的な仮定を崩し推定誤差を増大させる主因となるが、本研究では不変拡張カルマンフィルタ(InEKF)にアテンション機構を用いたニューラル補正器を統合した「AttenNKF」を提案した。 この手法は、足の速度と接触状態から算出される連続的な「滑りレベル」をコンテキスト(文脈)として利用し、クロスアテンション機構を通じて滑りの深刻度に応じた最適な補正をInEKFの事後状態に適用することで、滑りによるバイアスを直接的に除去する。 砂利道や低摩擦なテフロン路面、階段、長距離の屋外経路を用いた実験において、提案手法は既存の推定器よりも優れた精度を示し、特に滑りが発生しやすい条件下で累積誤差を顕著に抑制することに成功し、垂直方向のドリフト問題も大幅に改善した。
なぜこの問題か
脚式ロボットが多様な地形を自律的に移動し、安定した制御を実現するためには、ロボット自身の姿勢、速度、および位置をリアルタイムで正確に把握する状態推定技術が不可欠である。一般的に、カメラやLiDARなどの外部受容センサを用いた手法が広く研究されているが、これらは雨、雪、霧といった悪天候や、視界が遮られる環境下では性能が著しく低下するという致命的な弱点を持っている。一方で、レーダーは悪天候には強いものの、角度分解能の低さやノイズの影響により、地形の詳細を捉える能力には限界がある。そのため、どのような環境下でも頑健に動作するためには、IMU(慣性計測装置)や関節エンコーダなどの内部受容センサのみに依存する状態推定器が極めて重要な役割を果たす。 内部受容センサを用いた推定では、通常、足が地面に接触している間は滑りがないという「ノースリップ仮定」に基づき、足の順運動学を利用してロボットの状態を更新する。しかし、実際の運用環境、特に不整地や低摩擦な路面では、足の滑りが頻繁に発生する。この滑りが発生すると、運動学的な測定値がノースリップ仮定に違反し、フィルタの更新ステップにおいて推定値にバイアスが注入されてしまう。…
核心:何を提案したのか
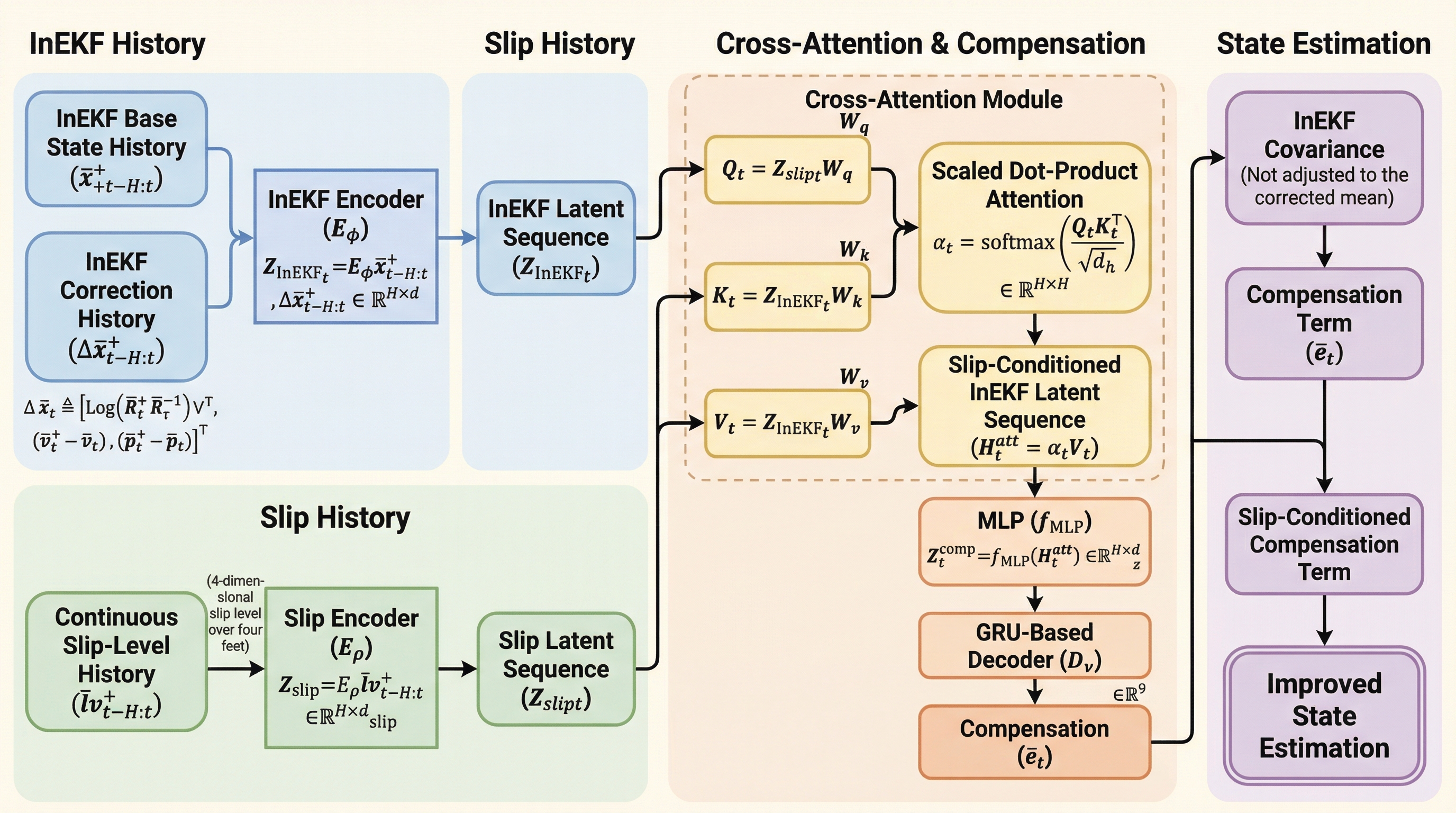
本研究の核心は、足の滑りによる誤差を明示的に推定し、補正を行うための新しいフレームワーク「Attention-Based Neural-Augmented Kalman Filter(AttenNKF)」を提案したことにある。この手法は、数学的に厳密な構造を持つ不変拡張カルマンフィルタ(InEKF)をベースとし、そこにアテンション機構を備えたニューラル補正器(NC)を組み合わせたハイブリッドな構成を採用している。最大の特徴は、滑りを単なる入力データの一つとして扱うのではなく、補正の構造を決定するための「コンテキスト(文脈)」として定義した点である。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related