低速なシリコンニューロンによる高速ロボット制御:スパイキング強化学習の活用
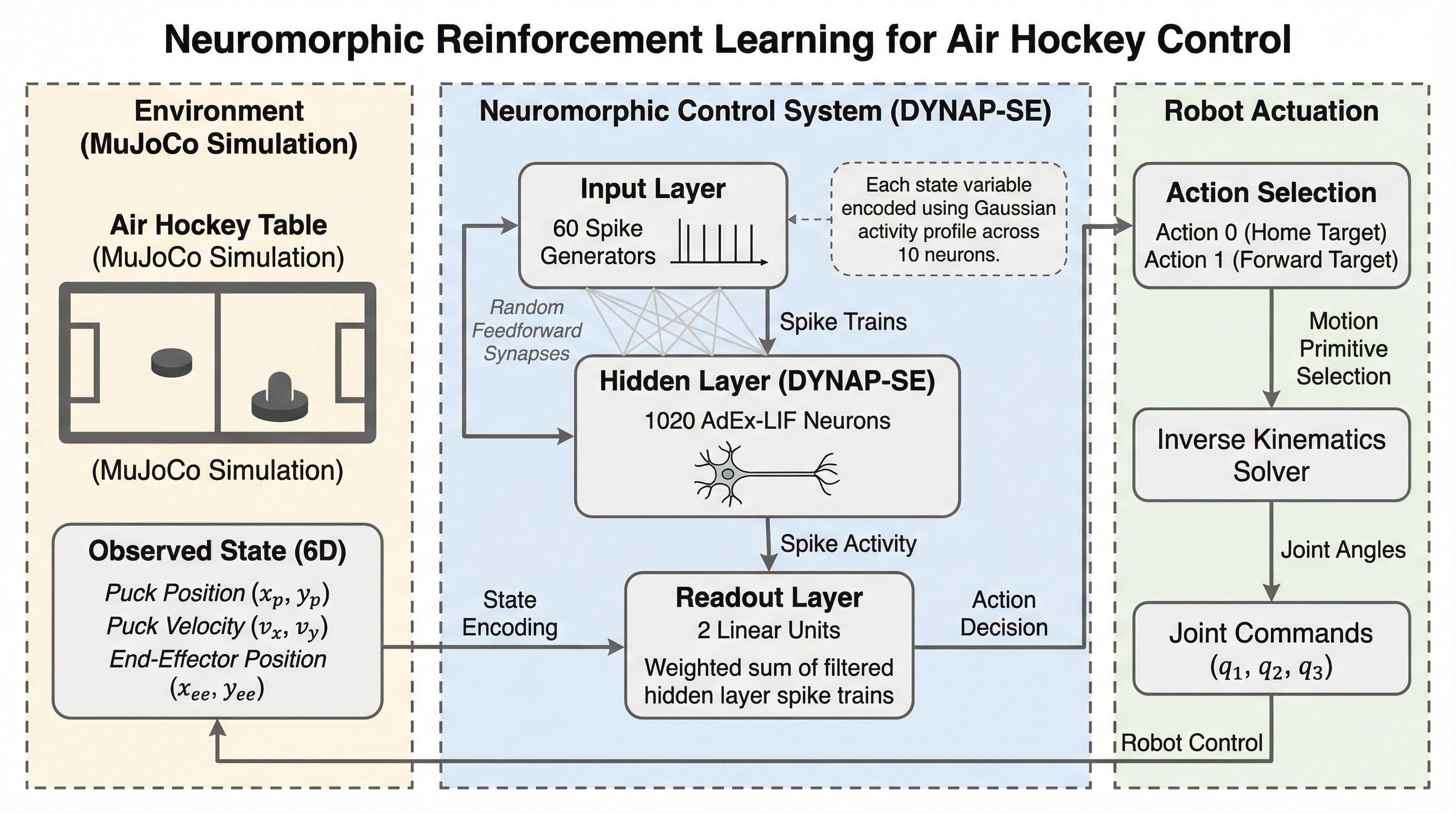
本研究は、ミリ秒単位の判断が求められる高速なエアホッケー競技において、アナログとデジタルの混合信号を扱う「DYNAP-SE」ニューロモーフィック・プロセッサを用いたスパイキングニューラルネットワーク(SNN)による制御を実現しました。
最新の論文記事を読みやすく整理。保存・タグ検索に加え、Plus/Proでは研究ノートと知識グラフで理解を積み上げられます。
Cog AI Archive
本研究は、ミリ秒単位の判断が求められる高速なエアホッケー競技において、アナログとデジタルの混合信号を扱う「DYNAP-SE」ニューロモーフィック・プロセッサを用いたスパイキングニューラルネットワーク(SNN)による制御を実現しました。
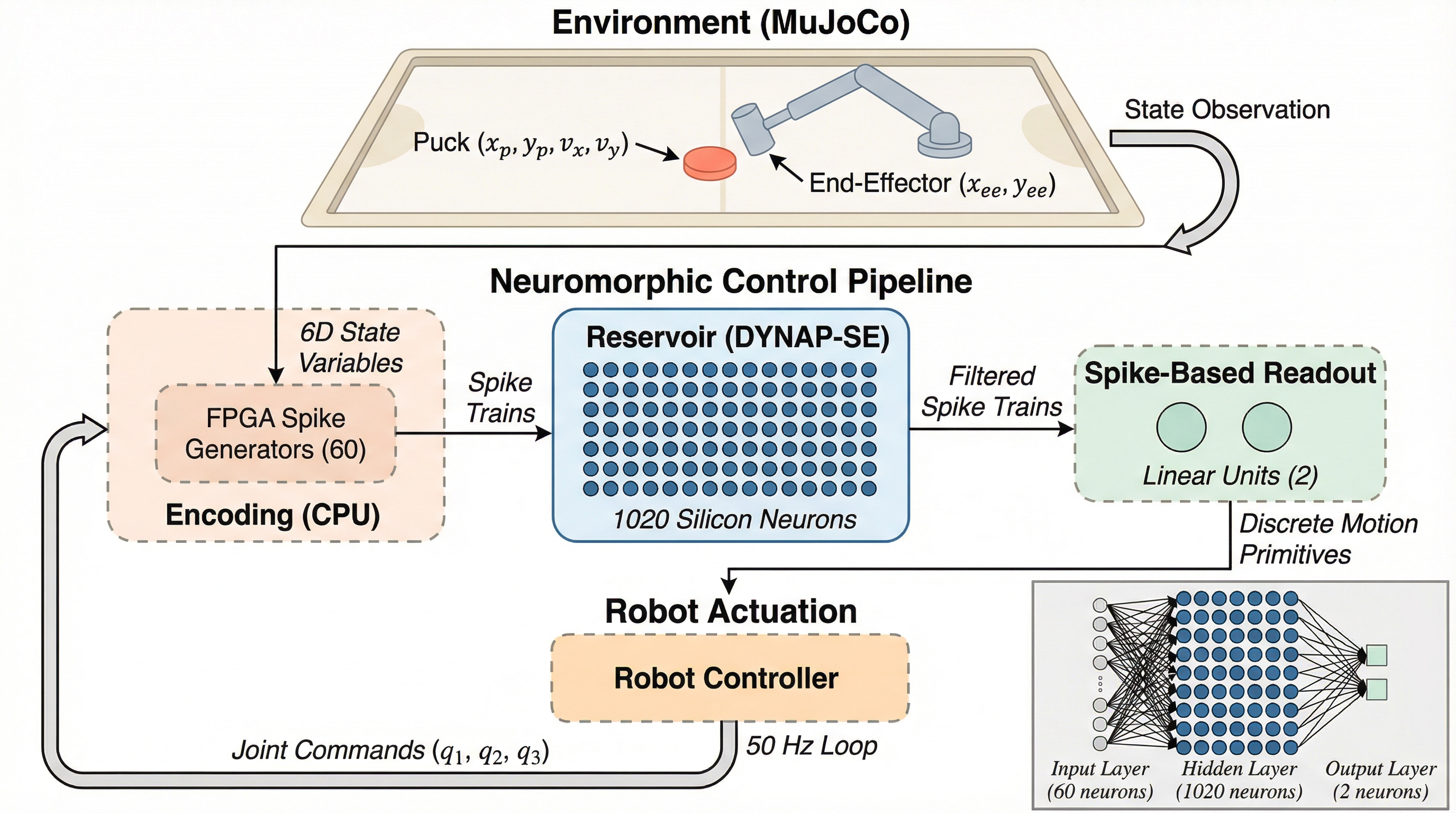
本研究は、低消費電力なアナログ・デジタル混在型ニューロモーフィック・プロセッサであるDYNAP-SEを活用し、極めて高速な意思決定が要求されるエアホッケー・ロボットの制御をスパイク強化学習によって実現した。
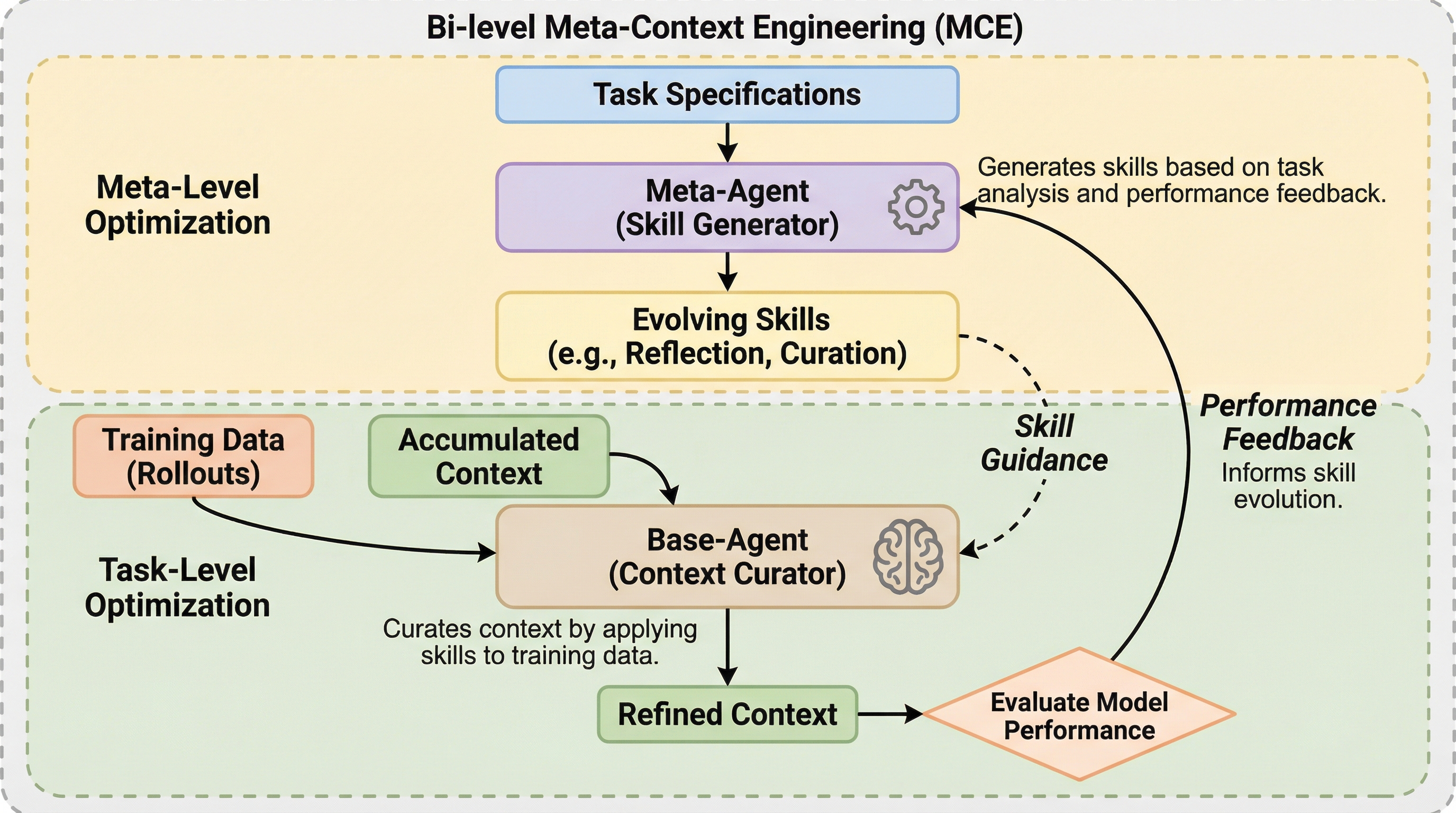
大規模言語モデル(LLM)の推論性能を最大化するため、文脈(コンテキスト)の構成方法そのものをAIエージェントに自律進化させる二段階の最適化フレームワーク「Meta Context Engineering(MCE)」が提案されました。
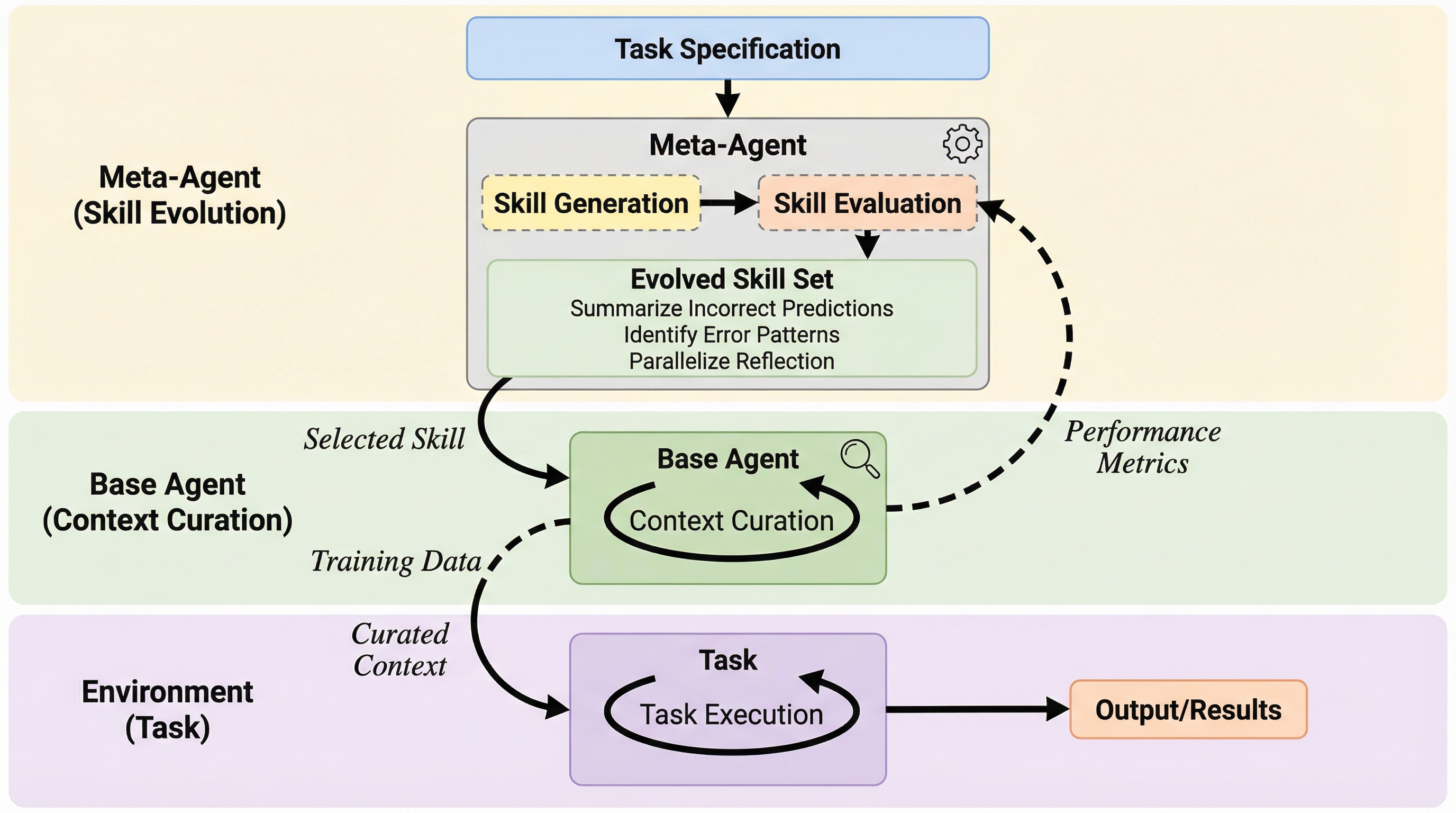
従来のコンテキストエンジニアリングは人間が設計した固定的なワークフローやスキーマに依存しており、構造的な偏りや設計空間の制限が課題であったが、本研究ではエンジニアリングスキルと成果物を共に進化させる「メタコンテキストエンジニアリング(MCE)」を提案した。
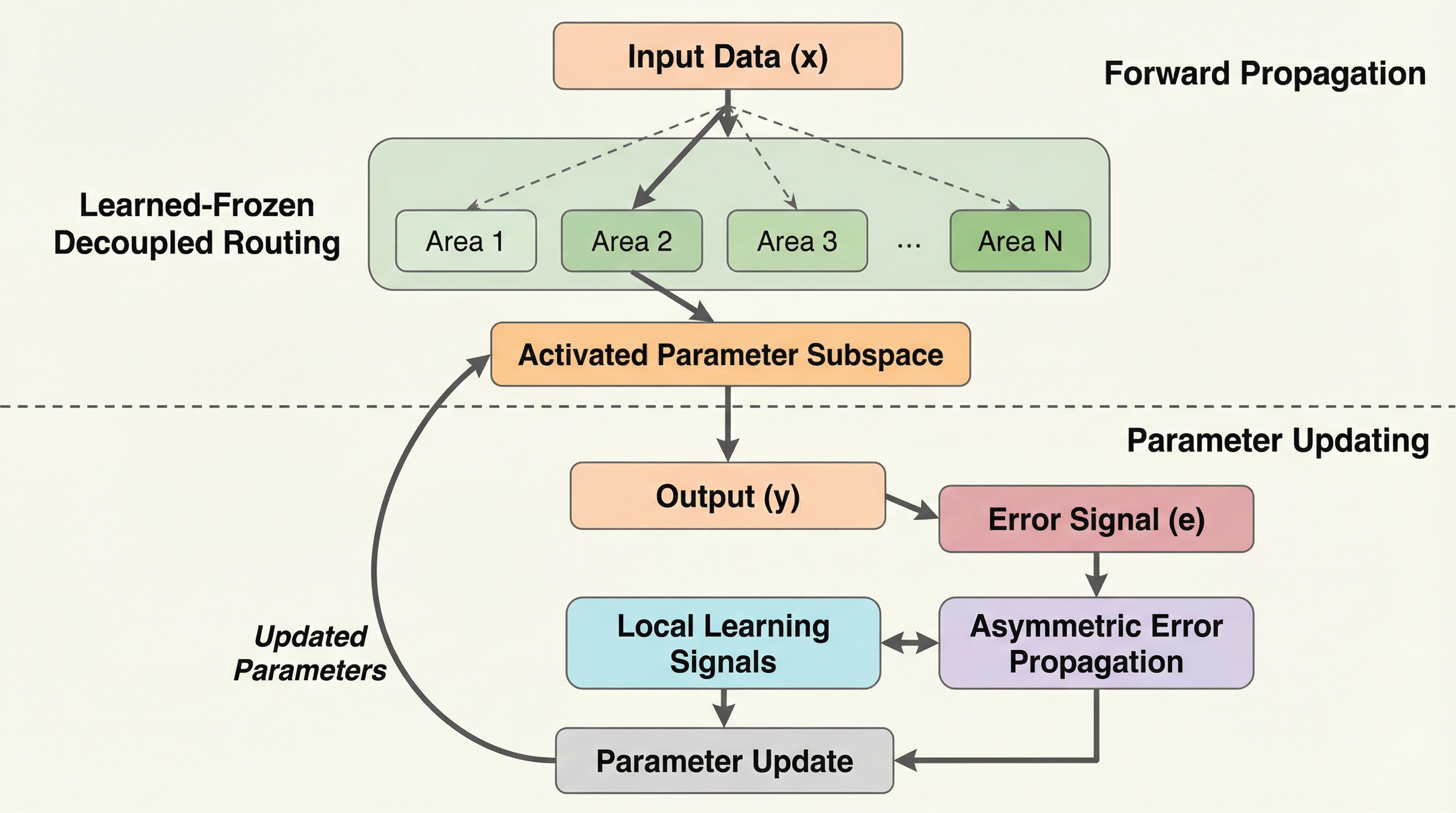
誤差逆伝播法(BP)が抱える生物学的な不自然さと、密なネットワーク表現における勾配干渉の問題を解決するため、選択的なパラメータ活性化と適応的な領域分割を組み合わせた新しい学習手法「Selective Adaptive Learning(SAL)」が提案されました。
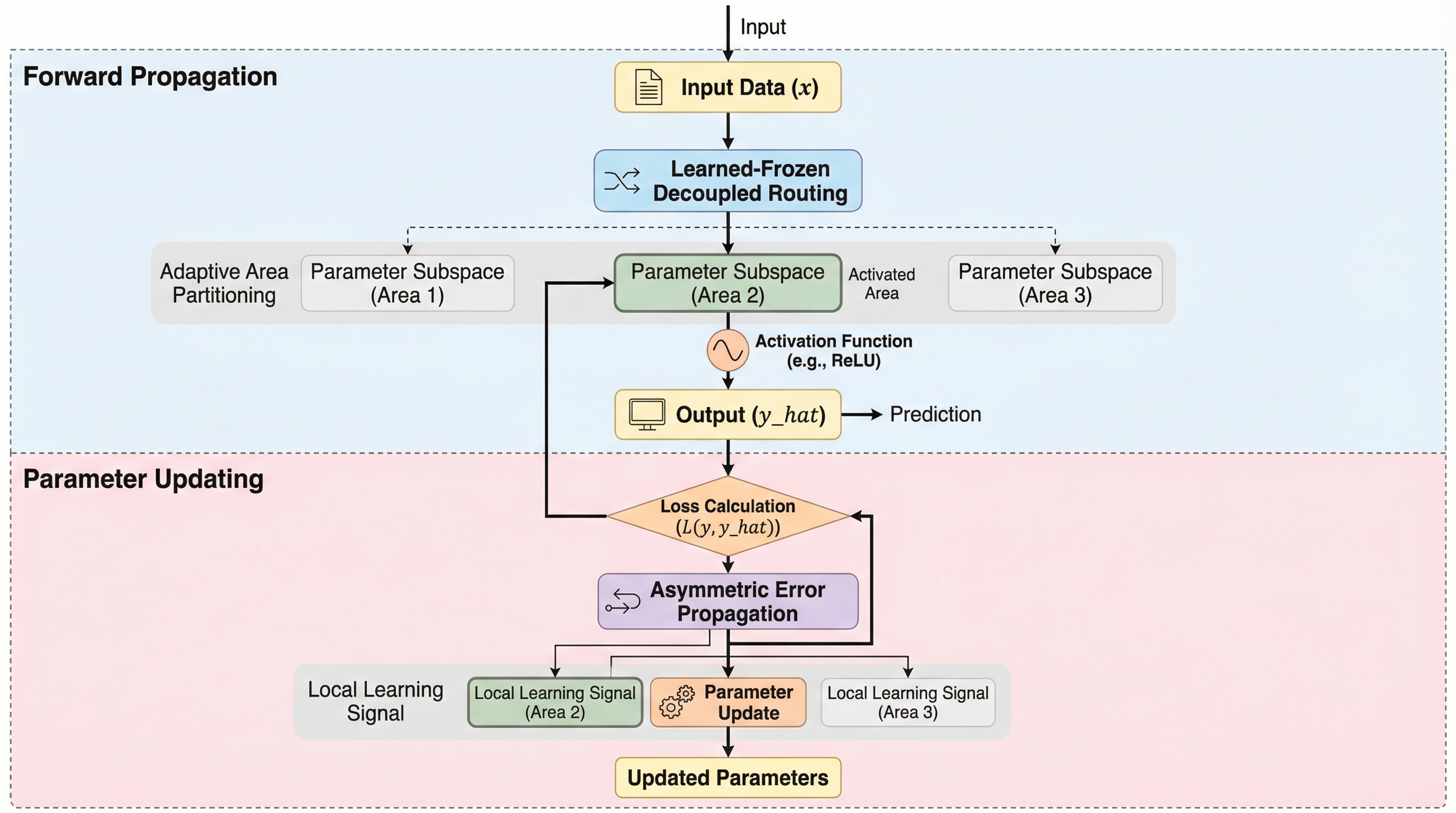
標準的なディープラーニングが依存するバックプロパゲーションの生物学的な不自然さと、密な表現における勾配干渉の問題を解決するため、選択的パラメータ活性化と適応的領域分割を組み合わせた「選択的適応学習(SAL)」が提案されました。
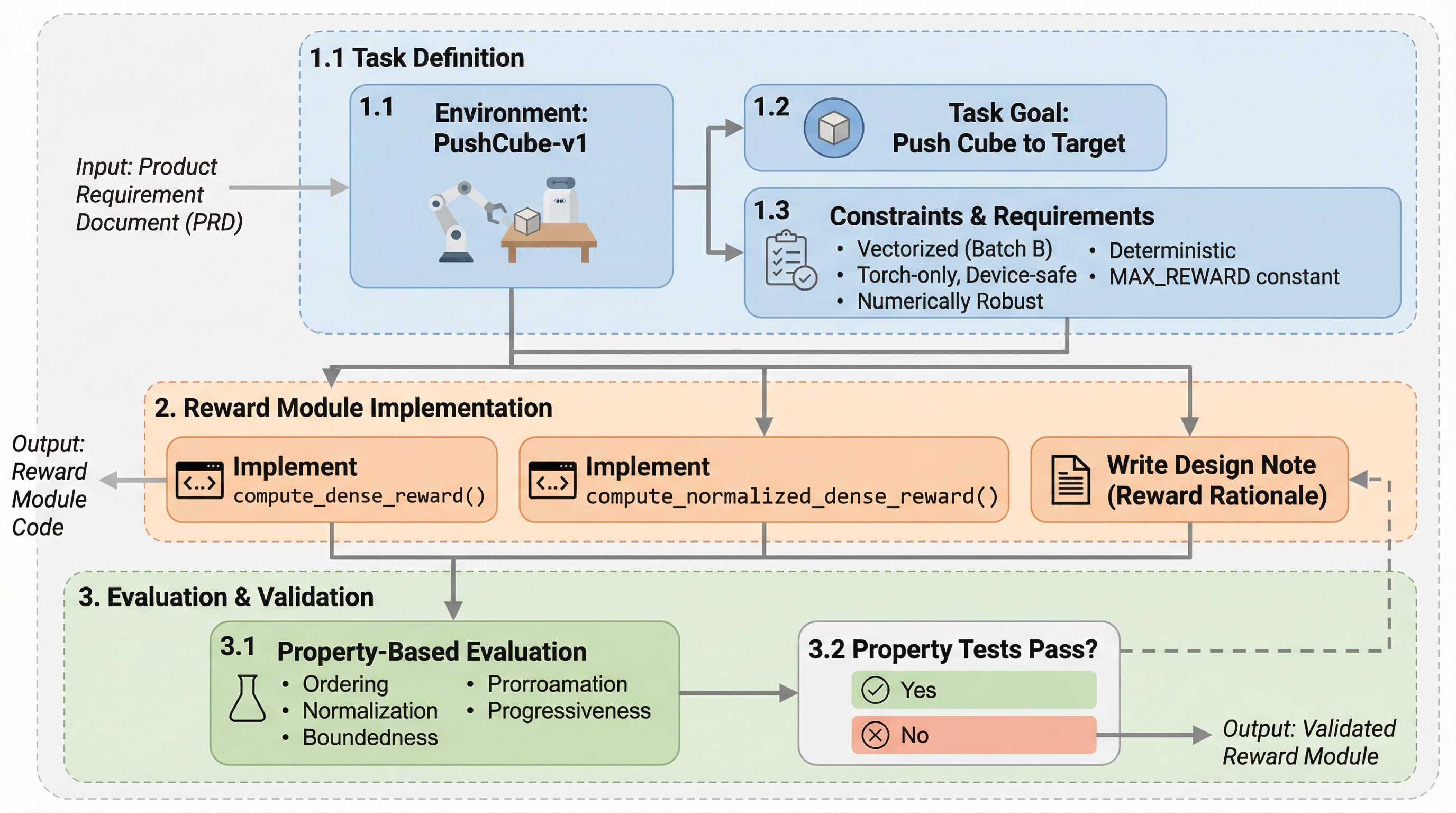
EmboCoach-Benchは、大規模言語モデル(LLM)を基盤としたエージェントが、ロボットの制御ポリシーを自律的に設計・実装・最適化する能力を評価するための、世界初のプロジェクトレベルのベンチマークである。
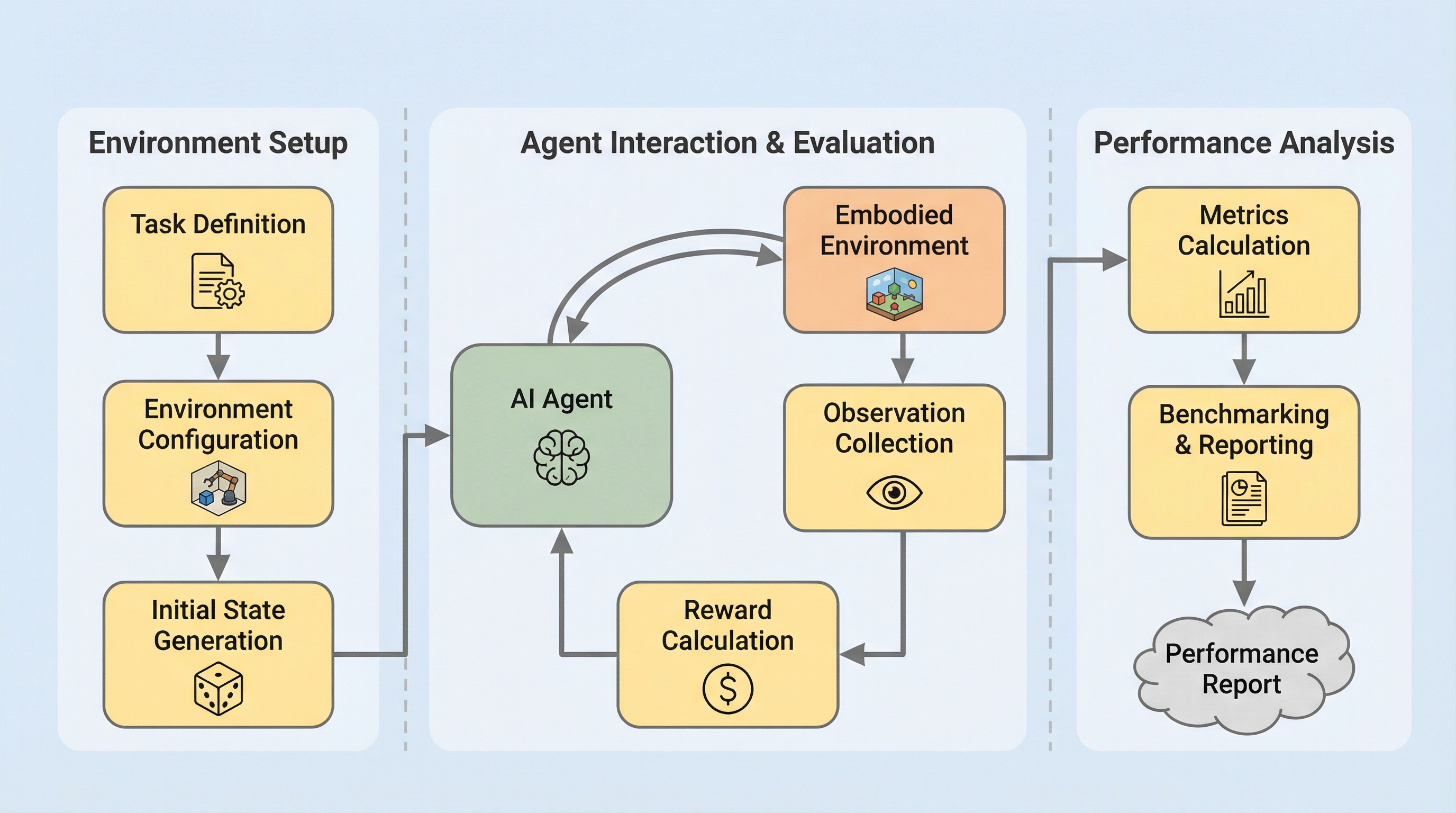
EmboCoach-Benchは、AIエージェントがロボットの制御ポリシーを自律的に設計・最適化する能力を評価するための新しいベンチマークであり、32種類の多様なタスクと4つの主要なシミュレーション基盤を用いて、エンジニアリングの全工程を網羅的に測定します。
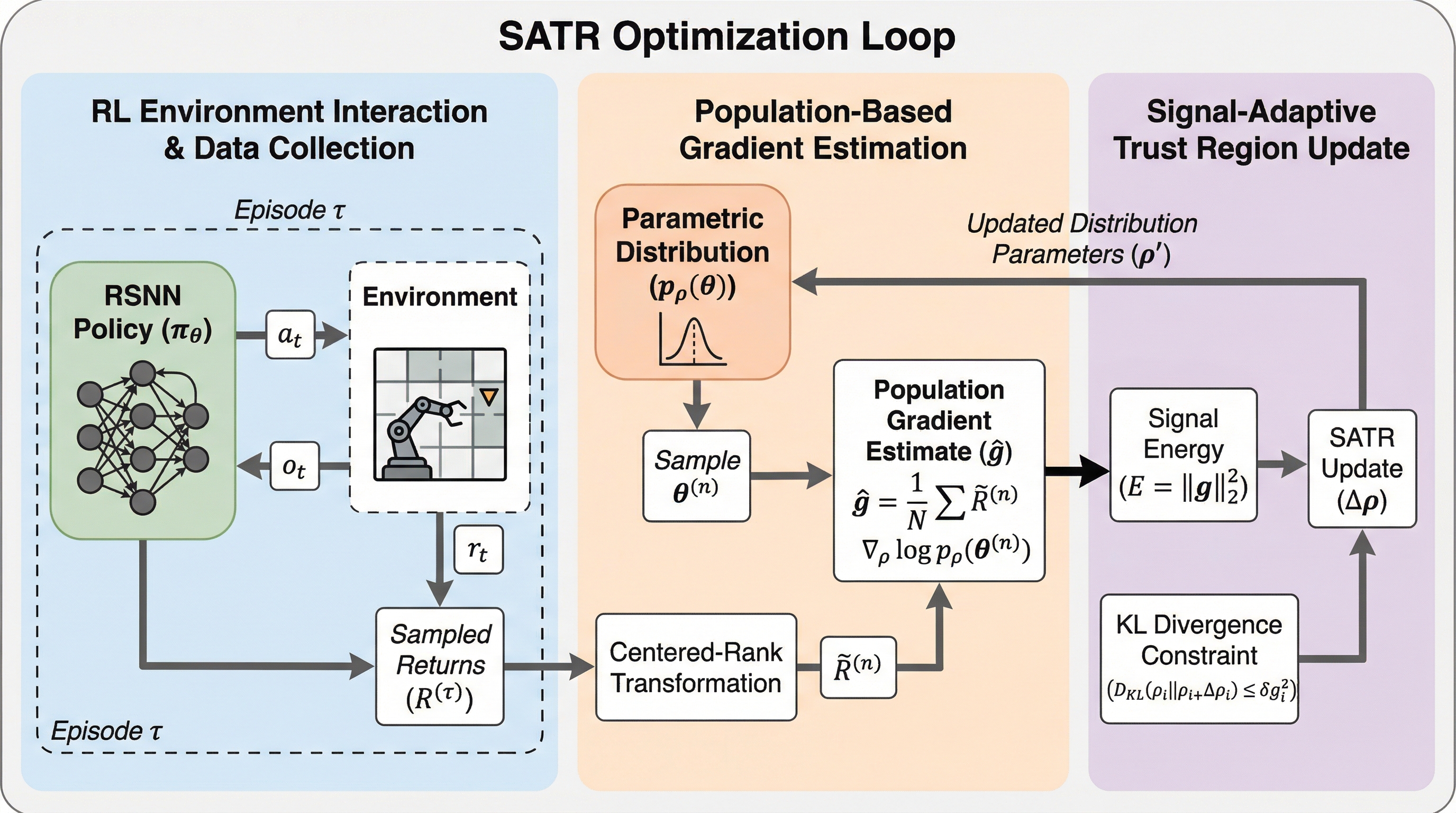
1. 再帰型スパイキングニューラルネットワーク(RSNN)の強化学習において、個体群ベースの勾配推定に伴うノイズと不安定さを解消するため、推定された信号エネルギーに基づいて更新幅(KLダイバージェンス)を動的に調整する「信号適応型信頼領域法(SATR)」を開発した。 2.
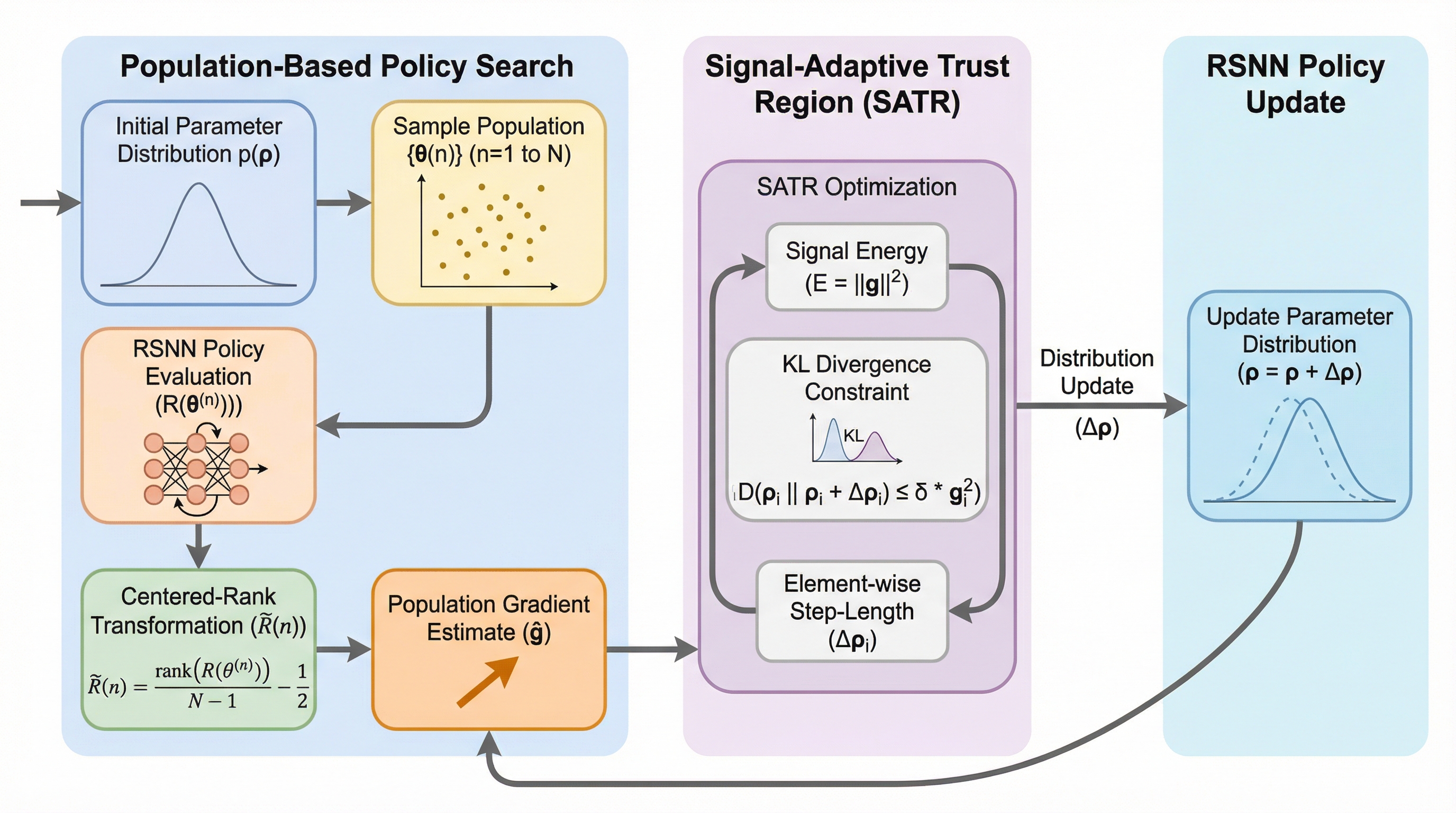
再帰型スパイキングニューラルネットワーク(RSNN)は、エネルギー効率に優れた制御ポリシーとして期待されていますが、高次元かつ長期的な強化学習タスクにおける訓練の不安定さが大きな課題となっていました。