Relevanceに基づいて「必要な知覚だけ動かす」:マルチモーダル逐次知覚のスケジューリング設計
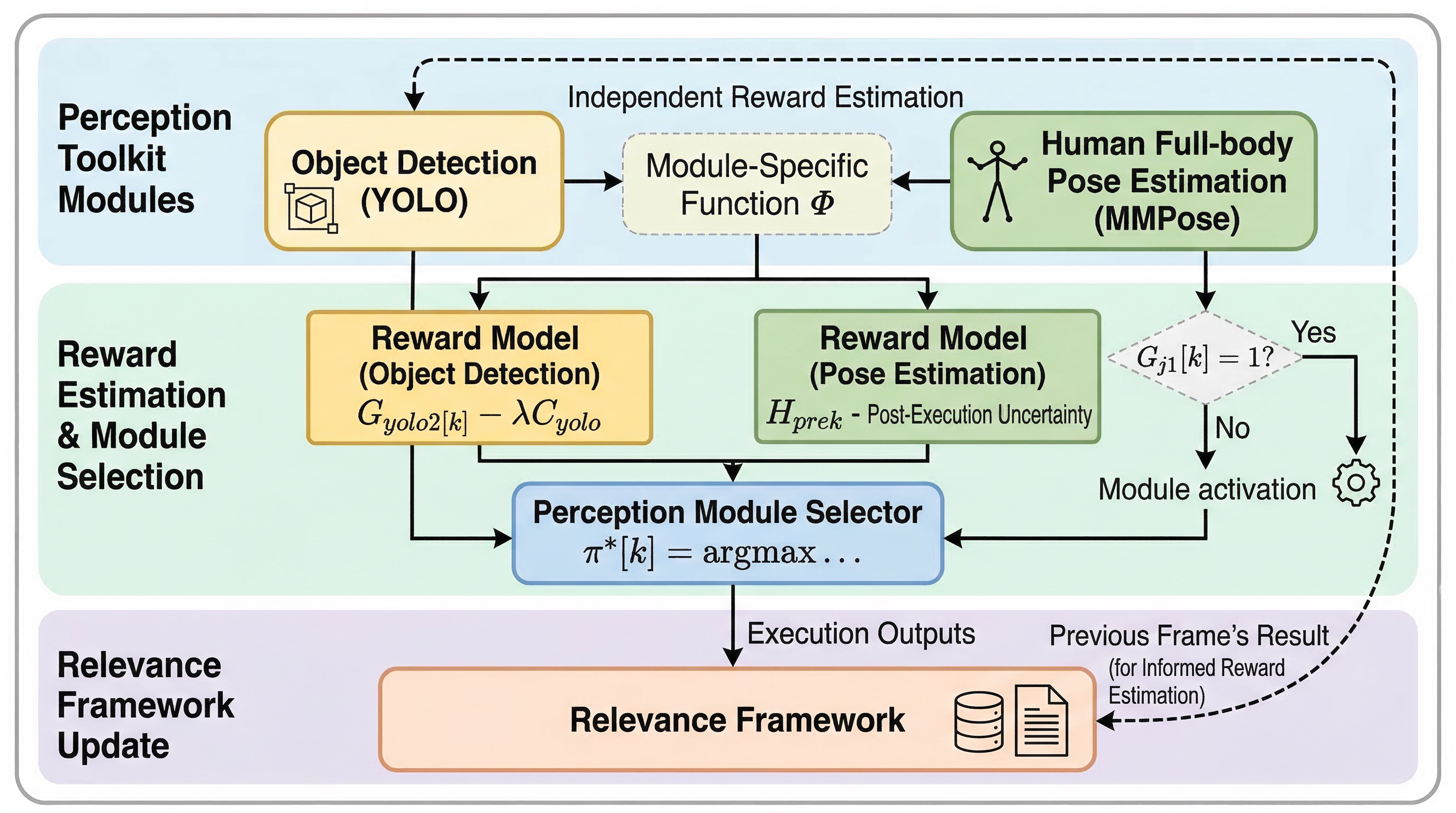
人間と協働するロボットでは、物体検出や姿勢推定など複数の知覚モジュールを毎フレーム動かすと遅延が蓄積し、逐次処理の現場ではむしろ全体性能を落とします。 提案手法は、前フレームの出力・動き・relevance を使って「今どのモジュールを起動すべきか」を reward ベースで判断し、不要なモジュールは推定でつなぐ軽量スケジューリングです。 実験では通常の並列パイプライン比で遅延を最大27.52%削減し、MMPose の activation recall を最大72.73%改善しつつ、keyframe accuracy も最大98%に達しました。