汎用視覚モデルだけで医用画像セグメンテーションは足りるのか:3データセット横断で見直す2次元MISの常識
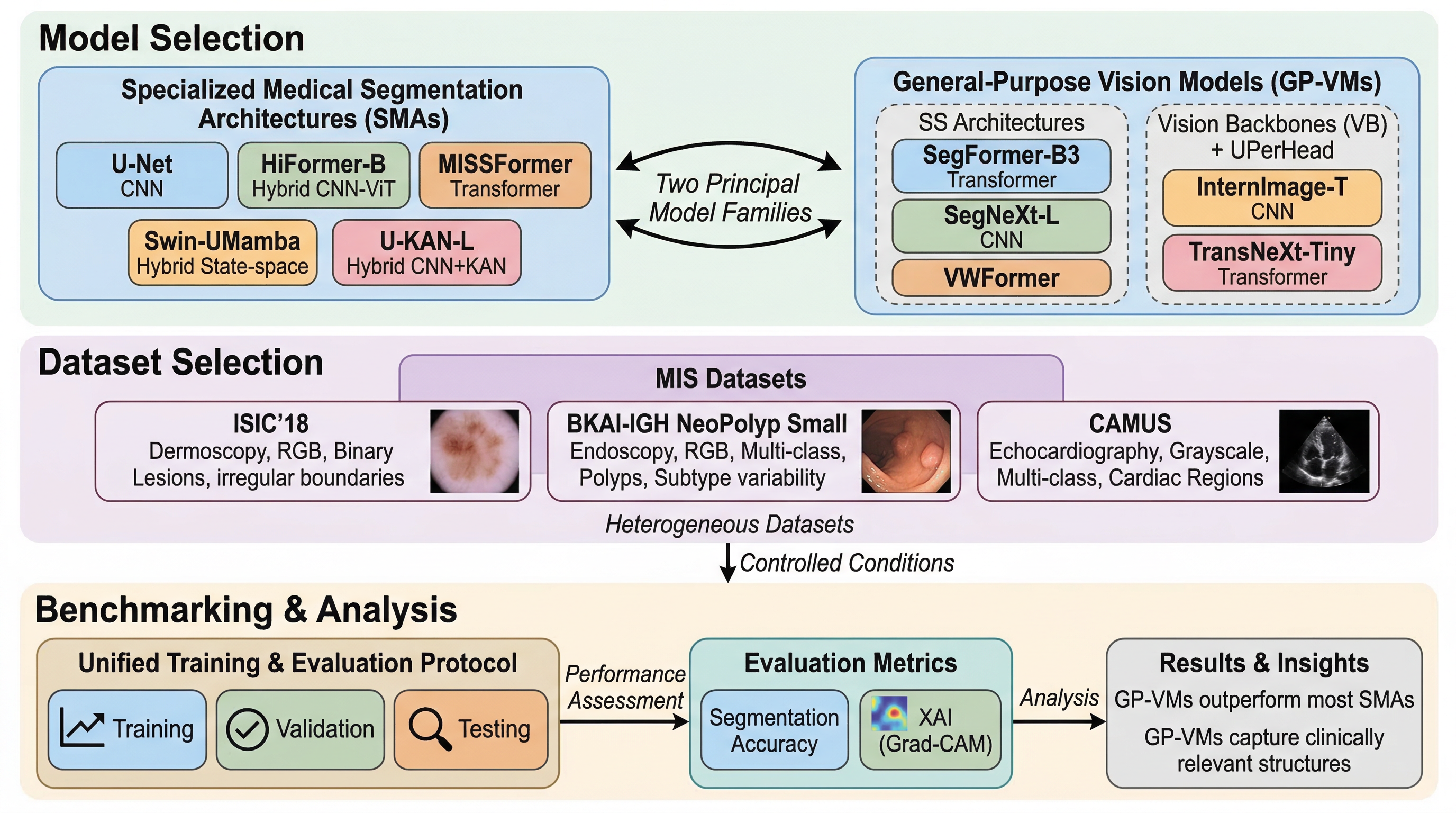
医用画像セグメンテーションでは専用設計モデルが有利だと考えられがちですが、3種類の異なる2次元データセットで厳密比較すると、汎用視覚モデル群が多くの専用モデルを上回りました。 比較は11モデルを同一学習条件で揃え、精度だけでなく Grad-CAM による可視化も確認した点が重要で、単なる実装差や訓練差ではない傾向を示しています。 結論は「専用モデルは不要」ではなく、まず汎用視覚モデルを強い基準線として検証し、そのうえでデータ整備やOOD評価へ資源を回すほうが研究効率が高い、というものです。