方策事前分布を用いた安全な探索
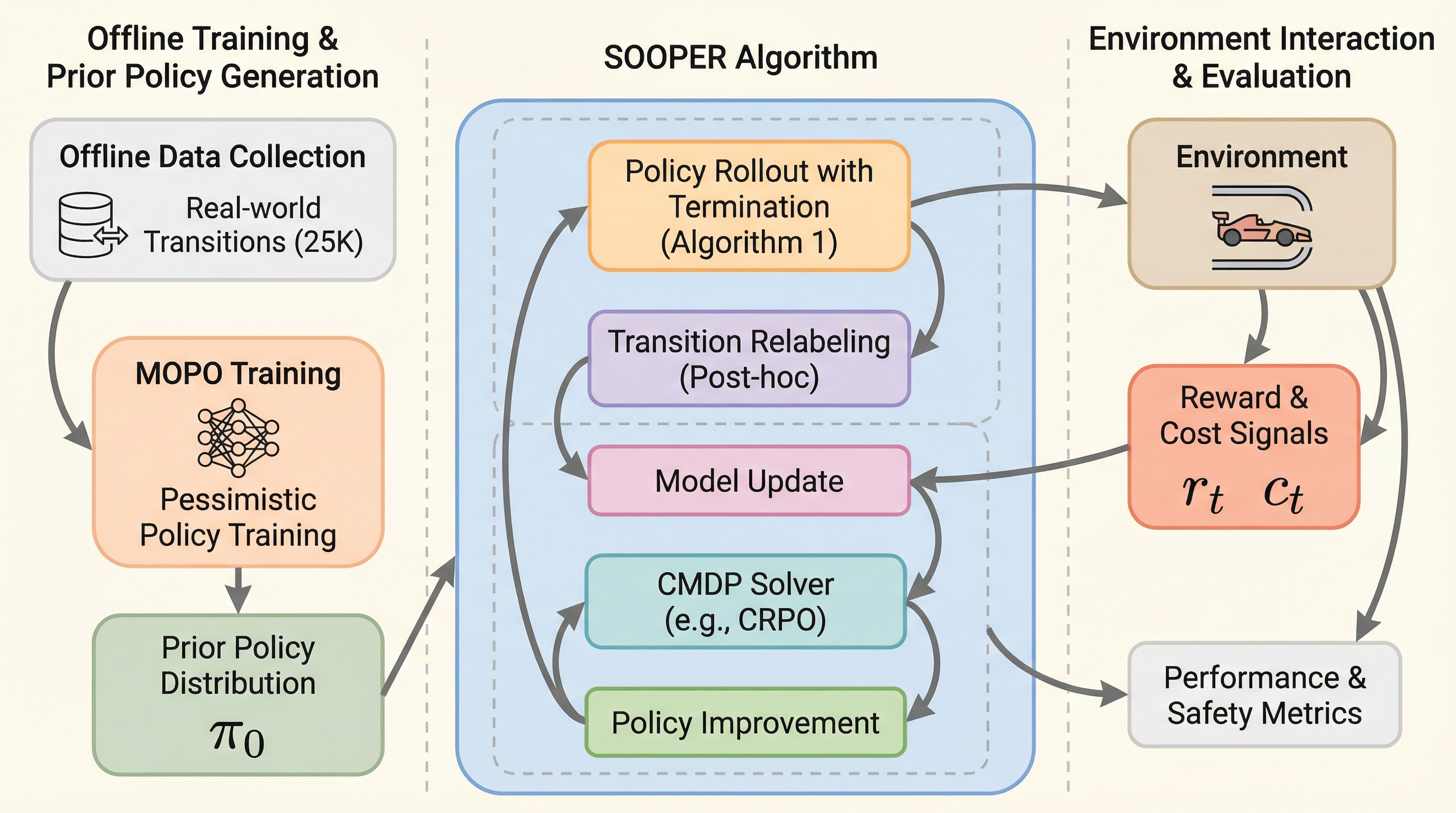
強化学習エージェントが実世界で学習する際、壊滅的な失敗を避けるための「安全な探索」が不可欠であり、本研究ではオフラインデータやシミュレータから得られる不完全だが保守的な「方策事前分布」を活用する新しいアルゴリズムであるSOOPERを提案した。
最新の論文記事を読みやすく整理。保存・タグ検索に加え、Plus/Proでは研究ノートと知識グラフで理解を積み上げられます。
Cog AI Archive
強化学習エージェントが実世界で学習する際、壊滅的な失敗を避けるための「安全な探索」が不可欠であり、本研究ではオフラインデータやシミュレータから得られる不完全だが保守的な「方策事前分布」を活用する新しいアルゴリズムであるSOOPERを提案した。
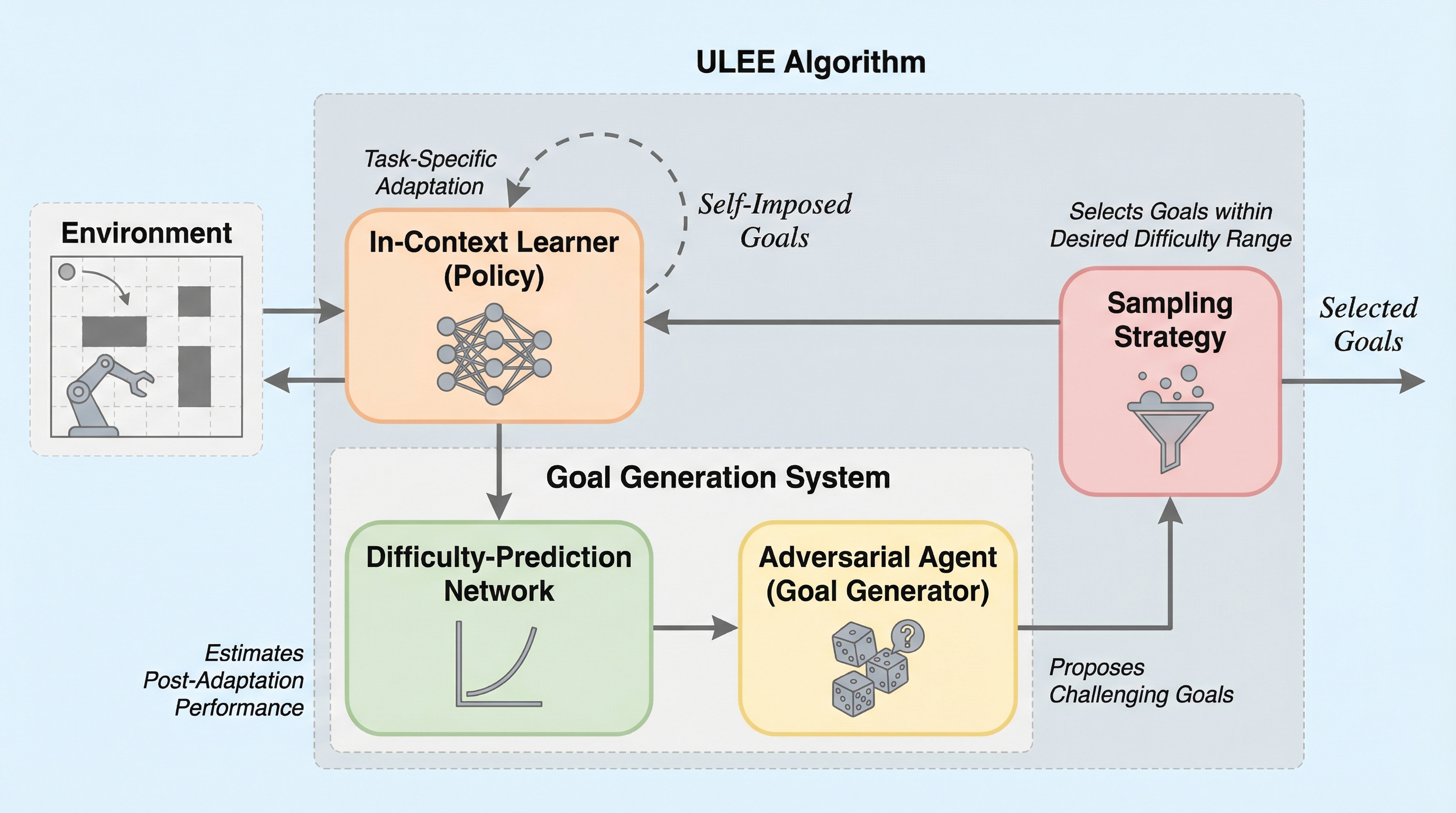
本研究は、外部報酬のない環境でエージェントが自律的に目標を設定し、効率的な探索と適応能力を習得するための教師なしメタ学習フレームワーク「ULEE」を提案しました。 従来の「現在の達成しやすさ」に基づくカリキュラムとは異なり、ULEEは「一定期間の適応後に達成可能な性能」を予測し、能力の境界にある適切な難易度の目標を敵対的に生成する仕組みを導入しています。 検証の結果、ULEEで事前学習されたエージェントは、未知の目的や環境構造、動特性に対しても優れた適応能力を示し、従来の学習手法を大幅に上回る汎用性を実証しました。
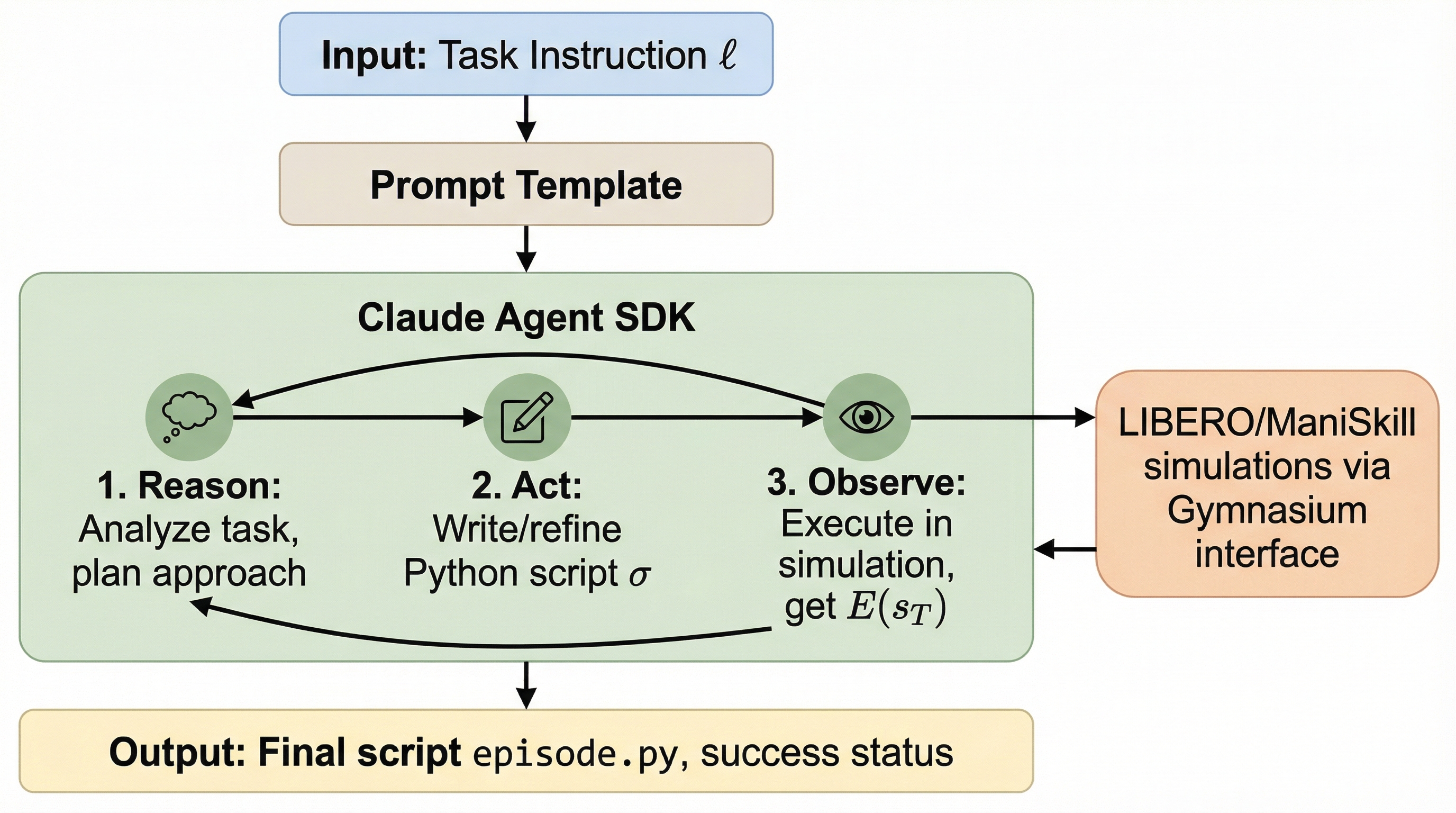
FAEA(Frontier Agent as Embodied Agent)は、ソフトウェア開発用に設計された汎用LLMエージェントであるClaude Agent SDKを、一切の変更を加えずそのままロボット操作に適用した手法であり、事前のデモンストレーションや追加学習を必要とせずに、試行錯誤を通じたプログラム合成によって自律的にタスクを遂行する。 LIBERO、ManiSkill3、MetaWorldという3つの主要なベンチマークにおいて、特権的な環境状態を利用することでそれぞれ84.9%、85.7%、96%という高い成功率を達成し、最大100件のデモンストレーションで学習した既存の視覚・言語・行動(VLA)モデルに匹敵、あるいはそれを上回る性能を示した。 この手法は、エージェントがシミュレーション内で自律的に成功軌道を生成できるため、ロボット学習のためのデータ拡張ツールとしての実用性が高く、汎用モデルの進化やエージェント基盤の改善がそのままロボット制御の向上に直結する新しいパラダイムを提示している。
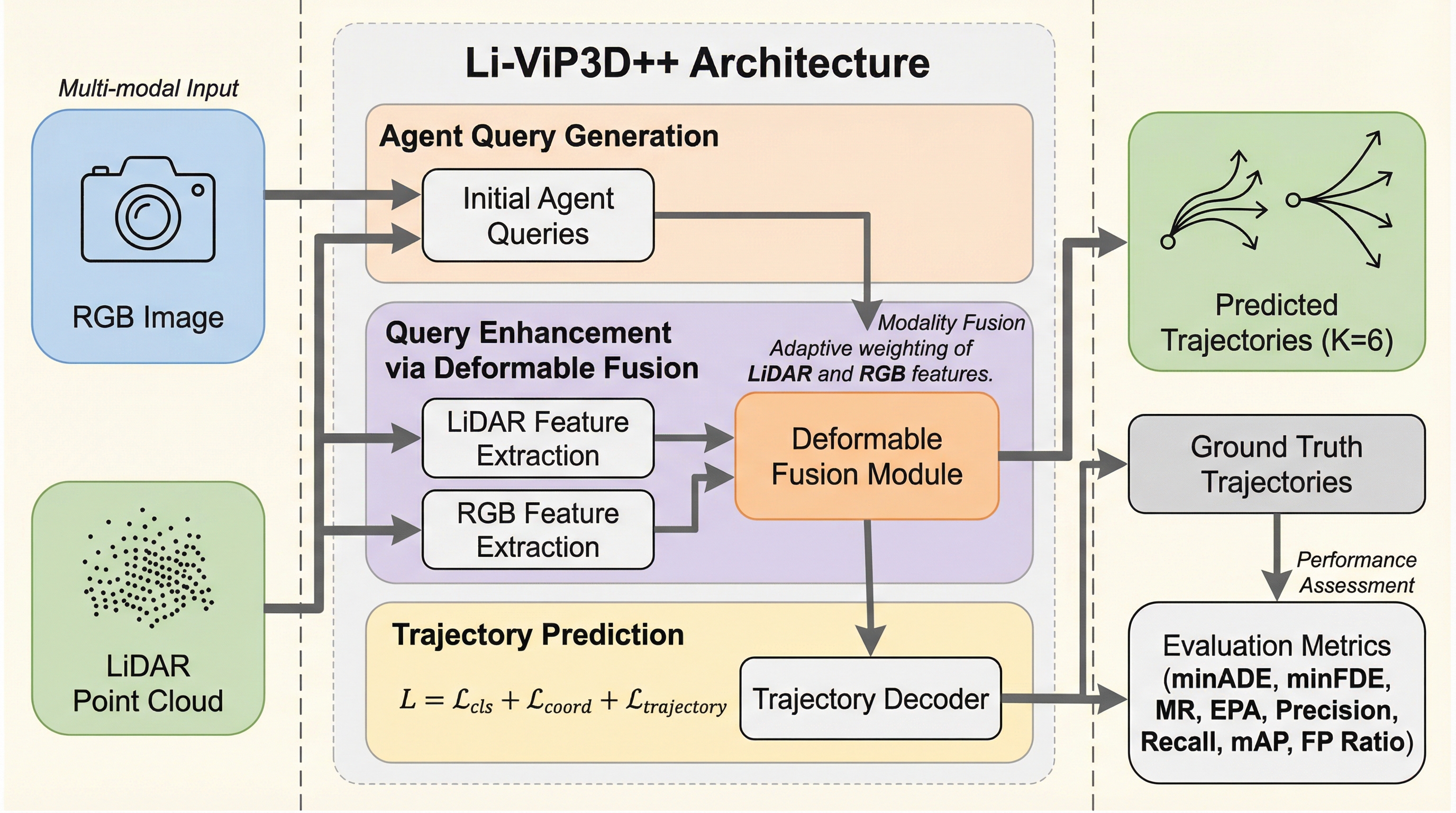
Li-ViP3D++は、自動運転における物体認識と軌跡予測を統合するエンドツーエンドのフレームワークであり、カメラとLiDARの情報をクエリ空間で融合するQuery-Gated Deformable Fusion(QGDF)を導入しています。
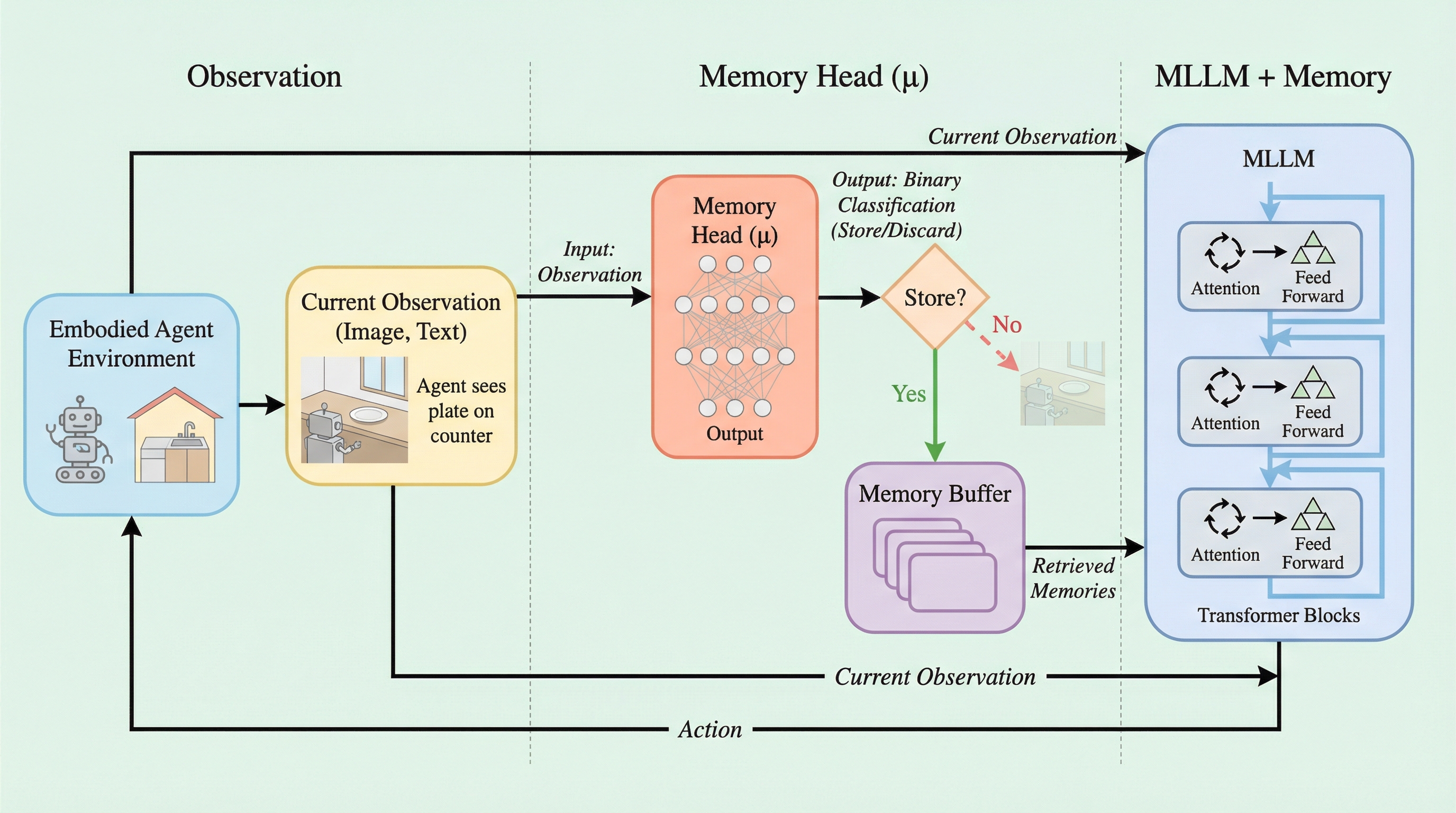
エンボディドエージェント(身体性を持つAI)において、マルチモーダル大規模言語モデル(MLLM)のコンテキストウィンドウの制限や計算資源の制約を解決するため、観測情報をリアルタイムで選別して保存・破棄を判断する「MemCtrl」という新しいフレームワークが提案されました。
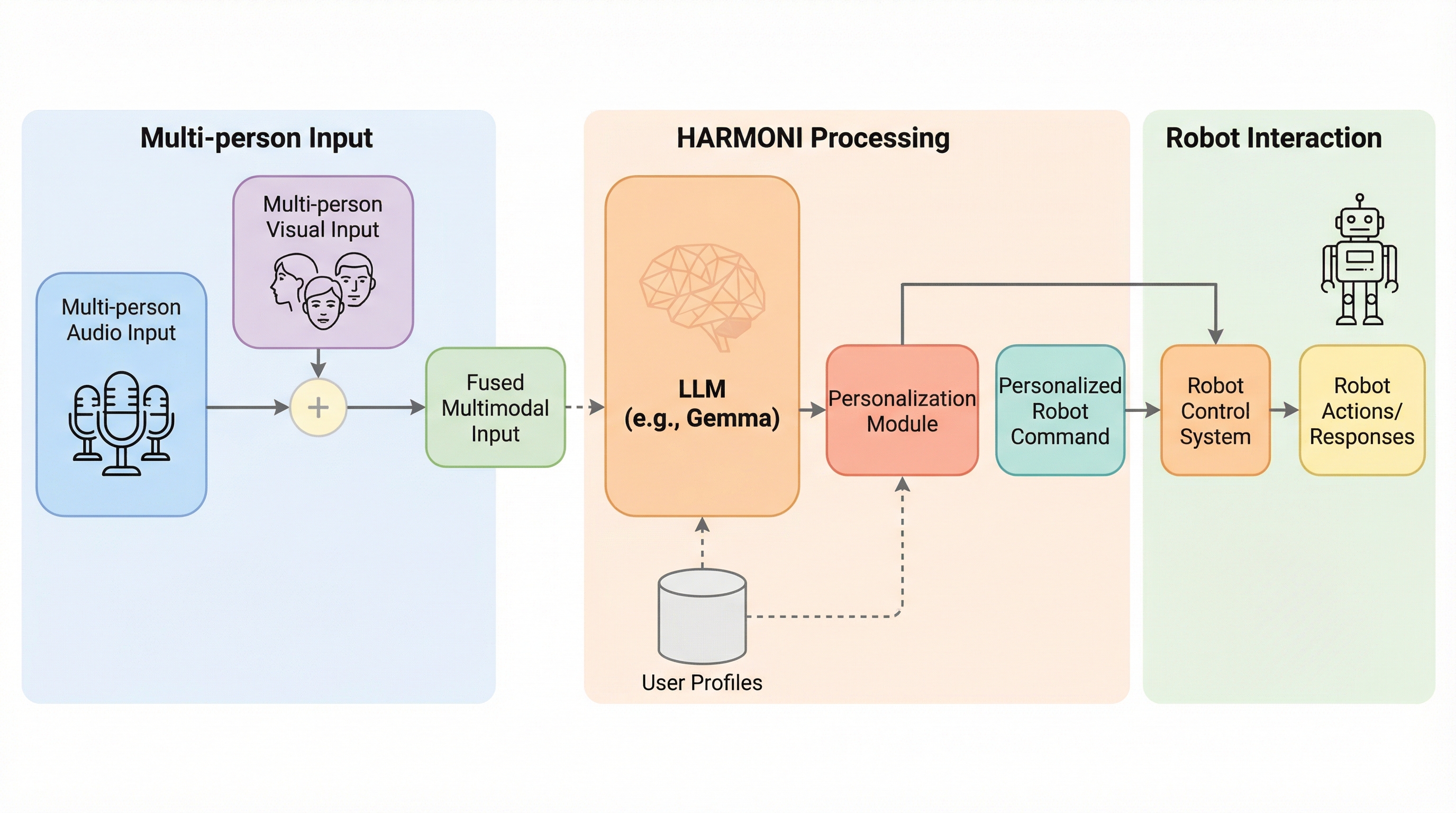
HARMONIは、介護施設のような多人数が同時に存在する複雑な環境において、大規模言語モデル(LLM)の能力を最大限に引き出し、個々のユーザーに対する長期的なパーソナライズを実現するための革新的なマルチモーダル・フレームワークである。
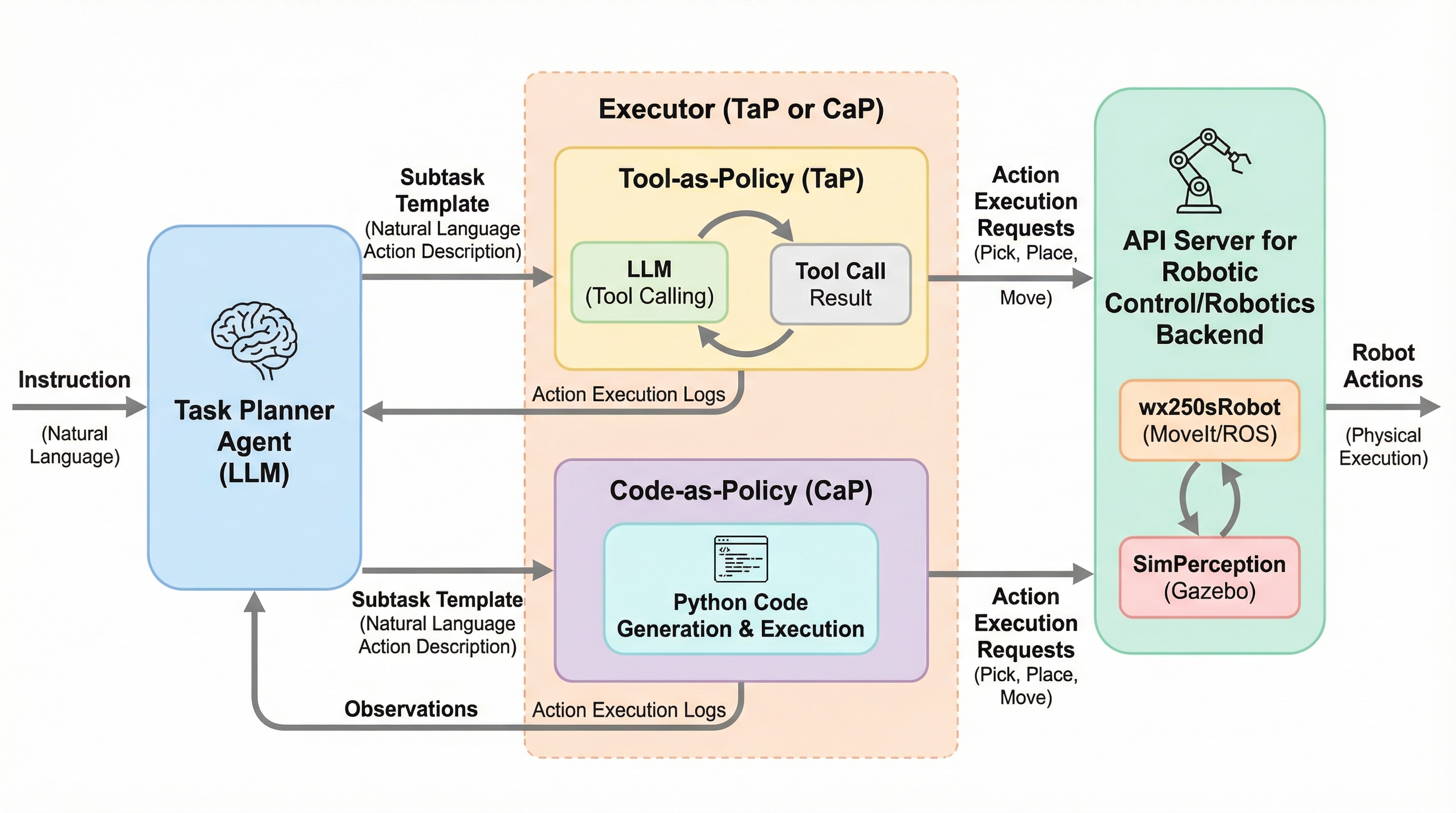
ALRMは、大規模言語モデル(LLM)をロボット操作の計画と実行に統合する新しいエージェント型フレームワークであり、ReAct形式の推論ループを通じて、タスクの分解、実行結果の反映、および計画の修正を動的に行う仕組みを提供します。