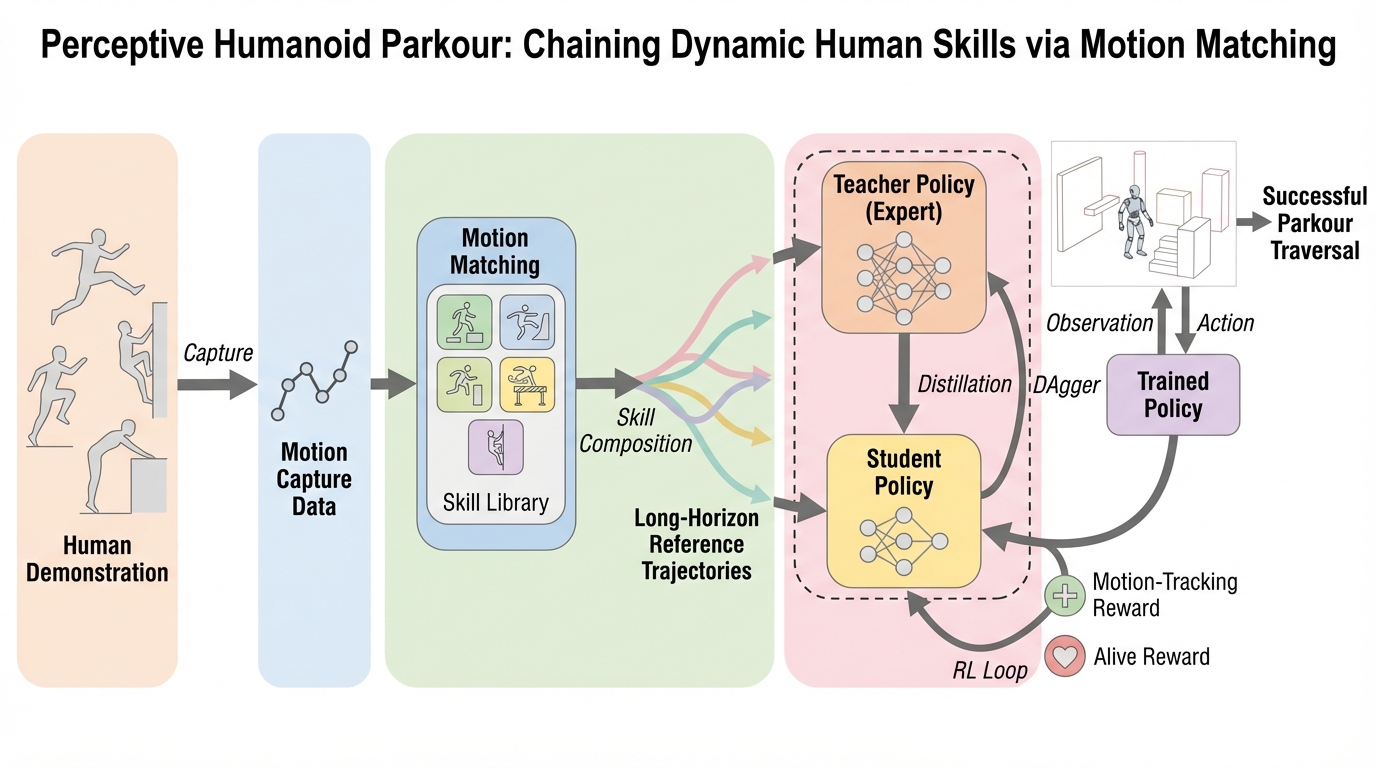
知覚するヒューマノイド・パルクール(PHP):Motion Matchingで人間スキル断片を連結し、深度入力の単一方策へまとめる枠組み。
少数で短い人間の高ダイナミクス動作データからでも、ヒューマノイドが視覚にもとづいて障害物コースを長時間にわたり自律走破できるようにする、モジュール型の枠組みが示されています。 / Motion Matchingを特徴空間での最近傍探索として使い、歩行・走行と原子スキルをつないで長時間の参照軌道を合成し、その参照を追従する複数の強化学習専門家を学習したうえで、DAggerと強化学習を組み合わせて深度入力の単一方策へ蒸留します。 / Unitree G1の実機で、深度センサと離散的な2次元速度指令だけを用い、約3 m/sの跳び越えや1.25 m(身長の96%)までの壁登り、60秒の連続走破、障害物の摂動に対する閉ループ適応が確認されています。
TL;DR(結論)
- 少数で短い人間の高ダイナミクス動作データからでも、ヒューマノイドが視覚にもとづいて障害物コースを長時間にわたり自律走破できるようにする、モジュール型の枠組みが示されています。
- Motion Matchingを特徴空間での最近傍探索として使い、歩行・走行と原子スキルをつないで長時間の参照軌道を合成し、その参照を追従する複数の強化学習専門家を学習したうえで、DAggerと強化学習を組み合わせて深度入力の単一方策へ蒸留します。
- Unitree G1の実機で、深度センサと離散的な2次元速度指令だけを用い、約3 m/sの跳び越えや1.25 m(身長の96%)までの壁登り、60秒の連続走破、障害物の摂動に対する閉ループ適応が確認されています。
なぜこの問題か
近年のヒューマノイド移動は、さまざまな地形で安定に歩ける段階へ進んできましたが、人間のように俊敏で適応的な「高ダイナミクス動作」をそのまま再現することは依然として難しいとされています。とくにパルクールのような環境では、転倒しない頑健さだけでは足りず、短い時間で接触状態が大きく変わる動作を、全身の高次元な制御で成立させる必要があります。さらに、障害物の高さや形状に応じて「またぐ」「乗り上げる」「跳び越える」「降りる」といった行動を選び分けるには、視覚など外界知覚と意思決定が密に結び付いていることが重要です。ところが、必要なスキルが増えるほど、それらを単一の視覚運動方策としてまとめ、しかもスムーズに切り替えさせることが難しくなります。 ここで頼りになるのが人間動作データですが、高速で接触が複雑な動作の計測には特殊な準備や慎重なデータ選別が必要になりやすく、スキルごとの実演が少数で、しかも数秒程度の短いクリップに限られることが多いと述べられています。…
核心:何を提案したのか
本研究は、Perceptive Humanoid Parkour(PHP)というモジュール型フレームワークを提案しています。目的は、ヒューマノイドがオンボードの深度知覚に基づき、複数障害物を含む難しいコースを長い時間軸で自律的に走破できるようにすることです。中心となる発想は、(1)少数の人間由来「原子スキル」をロボット向けに変換してライブラリ化し、(2)Motion Matchingを特徴空間の最近傍探索として用いてスキル断片を縫い合わせ、長時間の運動学的参照軌道を大量に合成し、(3)その参照軌道を追従する強化学習の専門家方策をスキルごとに学習し、(4)複数の専門家を単一の深度条件付きマルチスキル方策へ蒸留する、という流れです。 この構成により、遷移専用の人手データを多数用意しなくても、歩行・走行を「共通のつなぎ」として用いながら、複雑なスキル連鎖を柔軟に組み立てられるとされています。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related