低コスト・高効率:マトリョーシカ表現学習を用いたブドウ園におけるLiDAR場所認識
ブドウ園のような非構造的で特徴的な目印が乏しい農業環境において、ロボットが正確に自己位置を特定するための軽量な深層学習手法「MinkUNeXt-VINE」が提案されました。 既存のネットワーク構造を剪定して計算負荷を下げつつ、マトリョーシカ表現学習(MRL)を導入することで、低次元から高次元まで柔軟かつ頑健な記述子を生成し、リアルタイムでの高い処理効率を実現しています。 複数のブドウ園で収集された長期的なデータセットを用いた検証により、季節による外観の変化や低コスト・低解像度なLiDAR入力に対しても、従来の最先端手法を上回る優れた認識精度と汎用性が実証されました。
TL;DR(結論)
ブドウ園のような非構造的で特徴的な目印が乏しい農業環境において、ロボットが正確に自己位置を特定するための軽量な深層学習手法「MinkUNeXt-VINE」が提案されました。 既存のネットワーク構造を剪定して計算負荷を下げつつ、マトリョーシカ表現学習(MRL)を導入することで、低次元から高次元まで柔軟かつ頑健な記述子を生成し、リアルタイムでの高い処理効率を実現しています。 複数のブドウ園で収集された長期的なデータセットを用いた検証により、季節による外観の変化や低コスト・低解像度なLiDAR入力に対しても、従来の最先端手法を上回る優れた認識精度と汎用性が実証されました。
なぜこの問題か
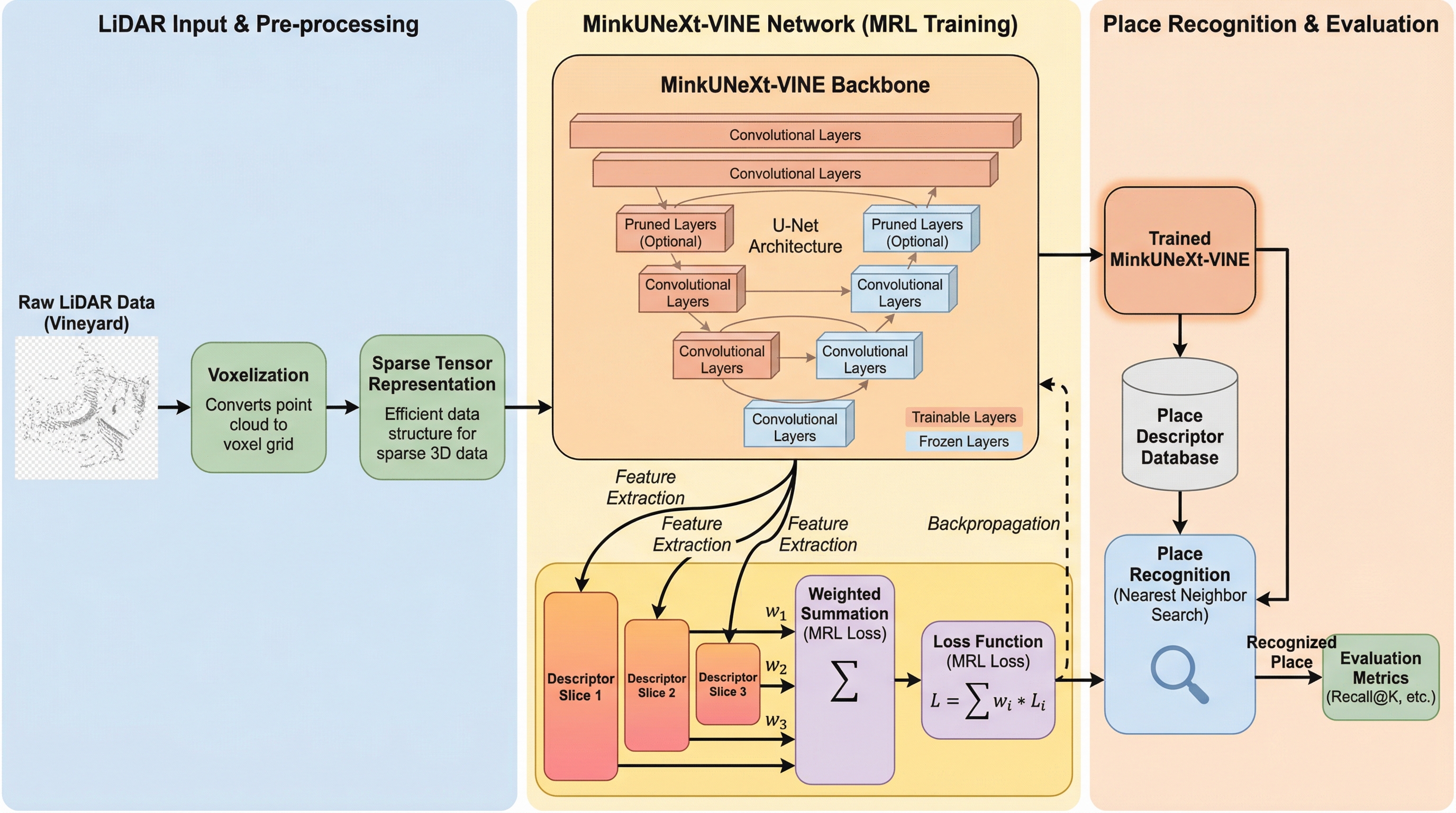
農業環境におけるロボットの自律走行や自己位置推定は、一般的な都市環境とは異なる特有の困難に直面しています。都市部では建物や道路標識などの明確な構造物や目印が豊富に存在しますが、ブドウ園のような農業現場は非構造的であり、視覚的に区別がつきにくい風景が連続しています。特にブドウ園では、同じような植物の列が繰り返し配置されているため、ロボットが現在どの列にいるのかを判断するための識別的な特徴が極めて少ないという問題があります。また、植物の成長に伴う葉の茂り具合や、季節の移り変わりによる景観の劇的な変化も、場所認識の精度を著しく低下させる要因となります。 さらに、ブドウ園の列内では植物による遮蔽が激しく、ロボットの視界が現在走行している列の内部だけに限定されてしまうことも珍しくありません。このような環境では、従来の視覚ベースのシステムは照明条件の変化や天候の影響を受けやすく、安定した運用が困難です。一方で、LiDAR(光検出と測距)技術を用いた3Dデータは、照明の変化に対して不変であり、幾何学的な情報を直接取得できるため、農業ロボットの自己位置推定において期待されています。…
核心:何を提案したのか
本研究では、ブドウ園での場所認識に特化した軽量な深層学習パイプライン「MinkUNeXt-VINE」を提案しています。この手法は、都市部での場所認識で優れた性能を示した既存のネットワーク「MinkUNeXt」をベースにしていますが、農業環境の特性に合わせて大幅な再設計が行われています。具体的には、元のアーキテクチャから非効率な層を剪定(プルーニング)し、ネットワークの複雑さを軽減することで、パラメータ数と処理の遅延を劇的に削減しました。これにより、計算リソースが限られたモバイルロボット上でもリアルタイムで動作可能な効率性を確保しています。 最大の特徴は、LiDAR場所認識(LPR)の分野で初めて「マトリョーシカ表現学習(MRL)」というトレーニング戦略を導入した点にあります。MRLは、ロシアのマトリョーシカ人形のように、一つの大きな記述子(ベクトル)の中に、より小さな次元の記述子が入れ子状に含まれるように学習させる手法です。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related