ソフトロボットを用いた触覚メモリ:マスク化エンコーディングとソフト手首による堅牢な物体挿入
物理的な柔軟性を備えたソフト手首と、過去の触覚体験をデータベース化して検索・再利用する機能を統合したロボットシステム「TaMeSo-bot」を開発し、位置の不確実性が高い環境下での堅牢なペグ挿入を実現しました。
TL;DR(結論)
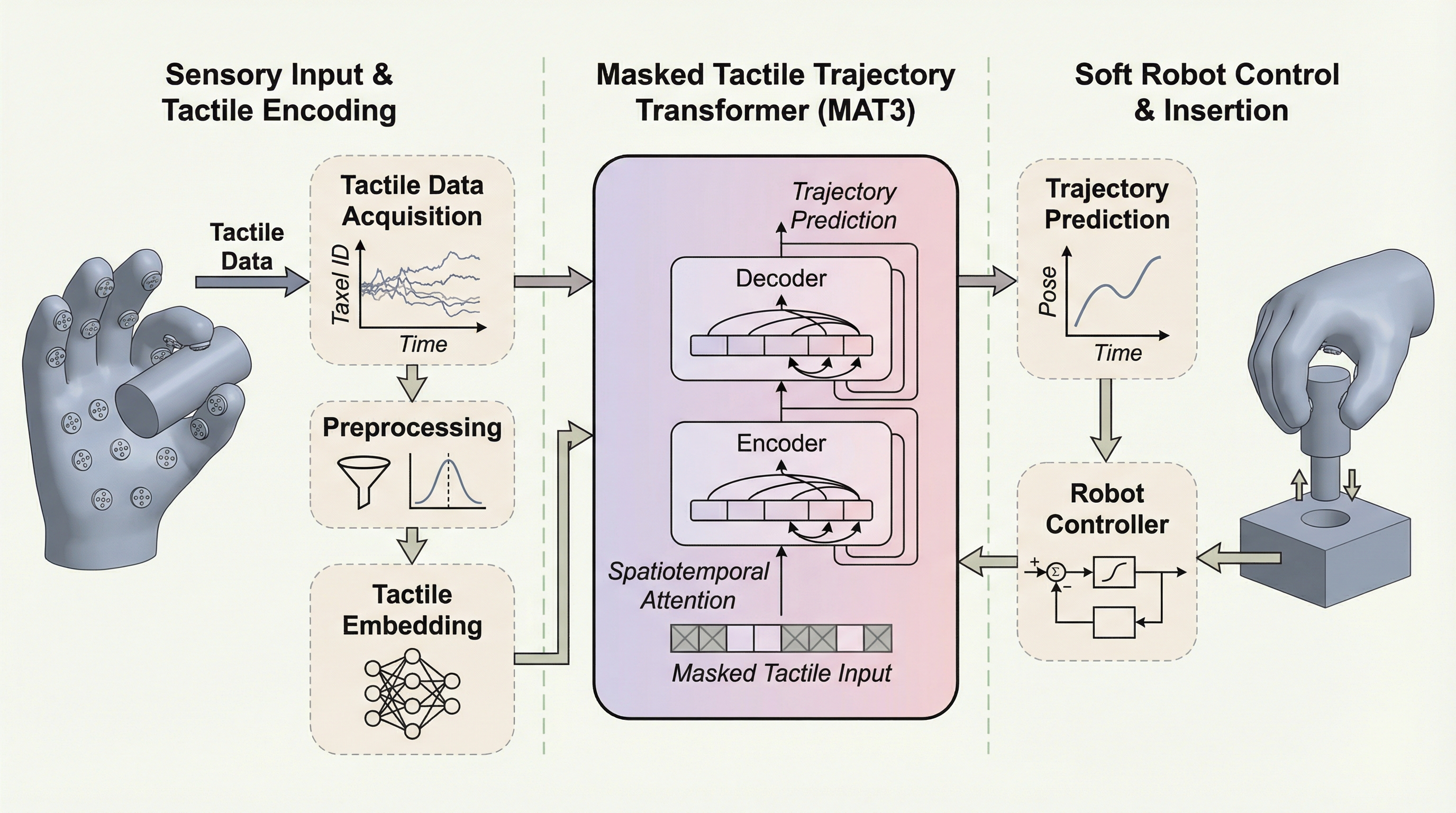
物理的な柔軟性を備えたソフト手首と、過去の触覚体験をデータベース化して検索・再利用する機能を統合したロボットシステム「TaMeSo-bot」を開発し、位置の不確実性が高い環境下での堅牢なペグ挿入を実現しました。 中核技術の「MAT3」は、マスク化トークン予測を用いた双方向Transformerを採用しており、分散型触覚センサの信号、力、ポーズ、行動の間の複雑な時空間的相互作用を統合的にモデル化することで、未知の状況下でも最適な行動を過去の経験から導き出します。 実機を用いた検証では、学習データに含まれない未知の形状のペグや、把持のズレ、接触面の摩擦の変化といった極めて困難な条件下においても、従来の手法を大きく上回る高い成功率と優れた適応能力を示すことが定量的に確認されました。
なぜこの問題か
人間は、鍵穴の正確な位置が視覚的に分からなくても、周囲を優しく触りながら「どのようにフィットするか」という触覚的な記憶を頼りに、器用に鍵を挿入することができます。このような触覚フィードバックを通じた不確実性への対処は、人間の操作能力の根幹をなすものですが、これをロボットで再現することは極めて困難な課題でした。従来の剛体ロボットを用いたアプローチでは、接触時にわずかな位置誤差があるだけで過大な接触力が発生し、システムの保護停止が作動してタスクが中断してしまうという物理的な制約がありました。また、ペグ挿入のような接触の多いタスクでは、フィット、整列、挿入といった一連のサブタスクの遷移を人間が明示的に定義したり、膨大なデータに手動でアノテーションを付与したりする必要があり、これがシステムの汎用性を妨げる大きな要因となっていました。 既存の触覚表現学習の手法においても、触覚信号と他のモダリティ(力、トルク、ロボットの行動など)の間の複雑な時空間的相関を直接扱うことは困難でした。多くの手法は、各モダリティを個別に処理したり、単純に結合したりするにとどまり、時間的な相関を無視する傾向がありました。…
核心:何を提案したのか
本研究の核心は、物理的な柔軟性を備えた「ソフトリスト(柔軟な手首)」と、高度な触覚表現学習に基づく「触覚メモリ」を統合したシステム「TaMeSo-bot」の提案にあります。このシステムは、ハードウェアの柔軟性とソフトウェアの記憶メカニズムを相乗的に活用することで、接触の多いタスクにおける圧倒的な堅牢性を実現しています。ハードウェア面では、3つの並列コイルバネで構成された柔軟な手首を採用しました。この手首は6自由度の大きな変形を許容し、データ収集時や実行時の接触衝撃を物理的に吸収します。これにより、剛体ロボットでは困難だった「触れながら探る」という安全な接触探索と、安定した触覚データの取得が可能になりました。この物理的なコンプライアンスが、システム全体の安全性を担保する重要な役割を果たしています。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related