壊れていても、進み続ける:身体性とタスクを条件とした拡散ポリシーによるフェイルアクティブな軌道生成
ロボットの関節故障(可動域制限やロック)が発生した際、システムを停止させずにタスクを継続する「フェイルアクティブ」な動作を実現するため、拡散モデルを用いた軌道生成フレームワーク「DEFT」を提案しました。
TL;DR(結論)
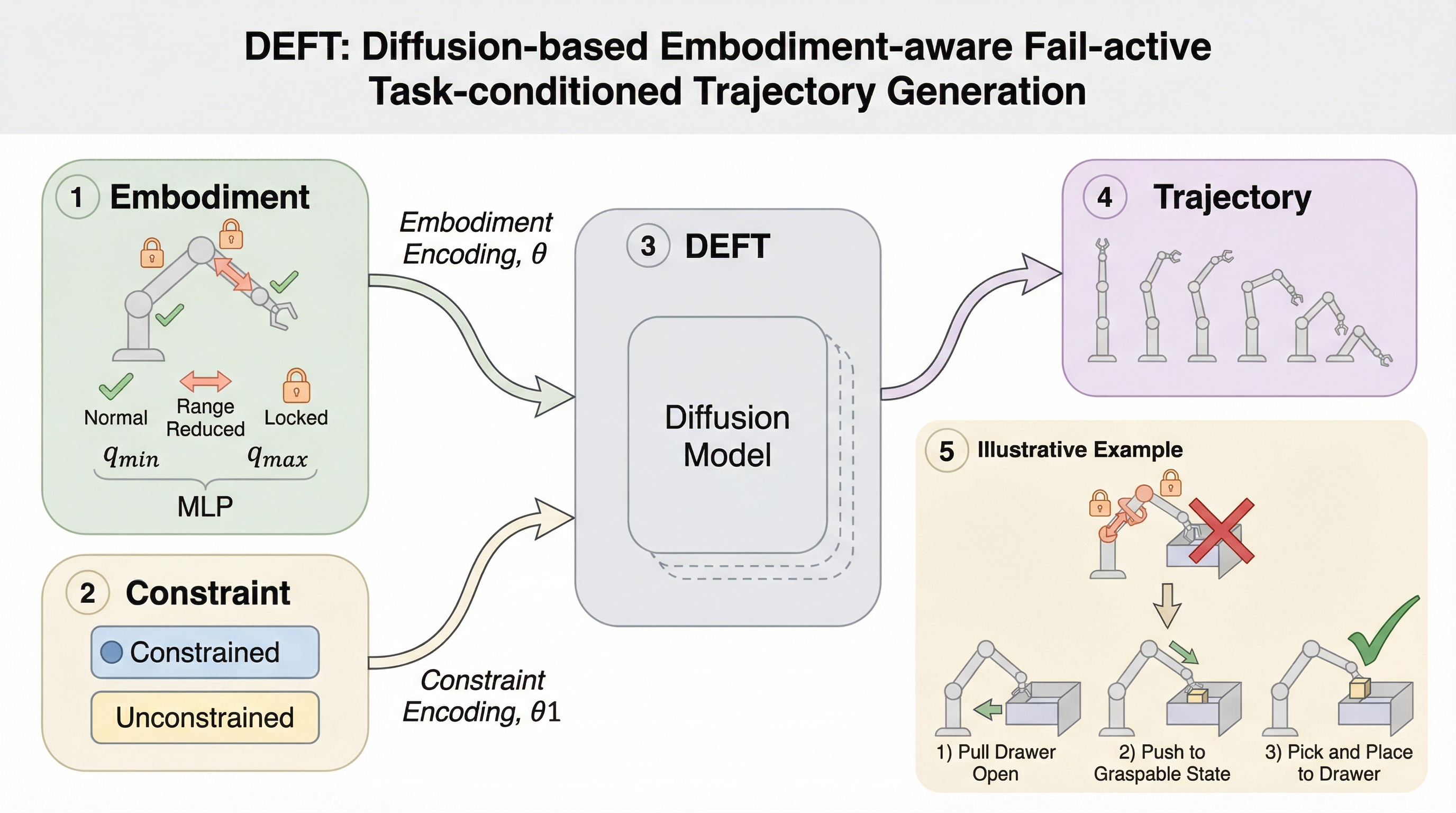
ロボットの関節故障(可動域制限やロック)が発生した際、システムを停止させずにタスクを継続する「フェイルアクティブ」な動作を実現するため、拡散モデルを用いた軌道生成フレームワーク「DEFT」を提案しました。この手法は、故障によって変化したロボットの身体状態(エンボディメント)とタスク制約を条件として入力することで、未知の故障パターンや複数の関節が同時に故障した状況下でも、適切な回避軌道をゼロショットで生成することが可能です。7自由度のロボットアームを用いた検証では、シミュレーションにおいて従来手法の最大2倍の成功率を記録し、実機実験でも引き出し操作やホワイトボード消去といった多段階タスクを故障状態で完遂することに成功しました。本研究は、故障を単なるエラーではなく「身体性の変化」として捉え直すことで、修理が困難な極限環境におけるロボットの自律性と信頼性を大幅に向上させる道筋を示しています。
なぜこの問題か
ロボットの故障は、システムの運用を著しく阻害し、復旧のために人間の介入を必要とすることが多い深刻な問題です。火星探査機「オポチュニティ」のロボットアームが肩関節の失速に見舞われた際や、「キュリオシティ」のドリルが故障した際のように、長期間運用されるシステムにおいて故障は避けられない事象です。しかし、現在の多くの安全基準では、故障が検出された場合にロボットを停止させる「フェイルフリーズ(故障時停止)」が一般的となっています。このアプローチは安全ではあるものの、ダウンタイムの長期化や自律性の低下を招くという課題があります。一方で、人間は足首を捻挫しても歩き続け、利き手が使えなければ反対の手で書くといった、機能を維持しながら活動を続ける能力を持っています。ロボットにおいても、故障条件下で機能を維持する「フェイルアクティブ(故障時動作継続)」の実現が強く求められています。 技術的な課題として、故障はロボットが物理的に実行可能な動作の範囲を根本的に変えてしまう点が挙げられます。関節の可動域制限や速度制限などのアクチュエーション故障は、到達可能なワークスペースを縮小させ、操作性を低下させます。…
核心:何を提案したのか
本研究では、故障を「身体性(エンボディメント)の変化」として捉え、拡散モデルを活用した軌道生成フレームワーク「DEFT(Diffusion-based Embodiment-aware Fail-active Task-conditioned trajectory generation)」を提案しました。DEFTの核心は、ロボットの現在の故障状態を構造化されたベクトルとしてエンコードし、それを拡散モデルの条件付けとして利用する点にあります。拡散モデルは、複雑で多峰性のあるデータ分布を学習する能力に長けており、故障によって変化した動作空間において、適切な行動を選択するのに適しています。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related