LSMART:現実条件を含む生涯型AGVフリート管理で、MAPF設計選択を比較評価できるオープンソース試験基盤。
LSMARTは、中央集権の生涯型フリート管理システムでAGV群を動かす状況を対象に、任意の多エージェント経路探索を現実的な実行条件(運動学、通信遅延、実行時間のばらつき)込みで評価できるオープンソースの試験基盤です。
TL;DR(結論)
- LSMARTは、中央集権の生涯型フリート管理システムでAGV群を動かす状況を対象に、任意の多エージェント経路探索を現実的な実行条件(運動学、通信遅延、実行時間のばらつき)込みで評価できるオープンソースの試験基盤です。
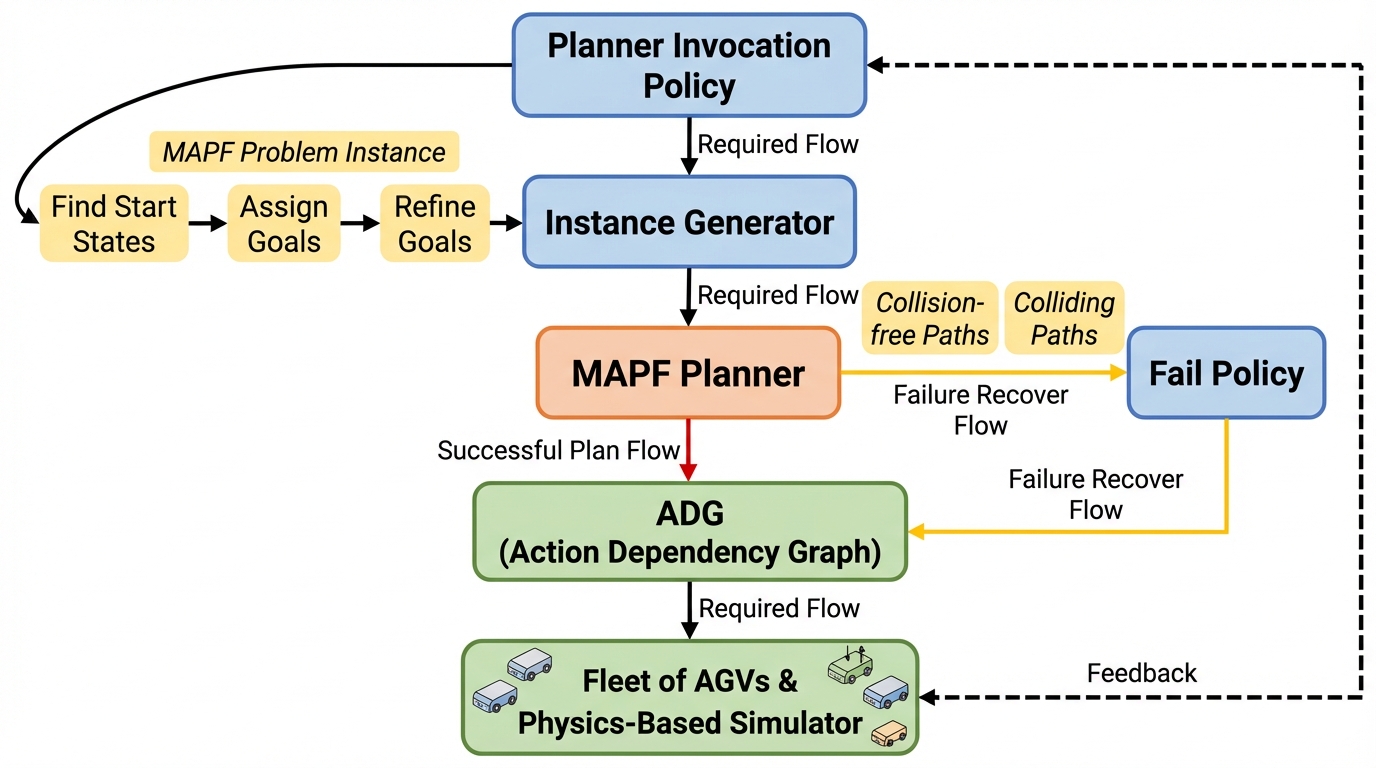
- 計画と実行が並行する運用で本質的になる「いつ計画するか」「どの前提で問題を作るか(目標の重複など)」「計画が失敗したときにどう回復するか」を、独立モジュールとして差し替え可能にし、研究者が同じ土俵で設計選択を比べられるようにします。
- 各設計選択に対して代表的な最新手法を実装して実験比較し、理想化された離散モデルだけで得た設計判断は、現実的なフリート管理条件では異なる振る舞いになり得ることを示して、中央集権・生涯型AGVシステム設計の指針を与えます。
なぜこの問題か
多エージェント経路探索は、複数のエージェントを開始位置から目標位置へ衝突なく移動させる問題として整理されます。生涯型の設定では、エージェントが目標に到達すると新しい目標が継続的に割り当てられ、システムは途切れなく移動計画を更新し続ける必要があります。自律倉庫などの応用では、複数台のAGVを中央集権的に調整するフリート管理システムが求められますが、既存の研究評価は単純化された前提に寄りがちです。代表的には、格子と離散時刻で移動するペブルモーションのようなモデルが多用され、通信が遅れず、実行も計画どおりに完璧に進むものとして扱われやすいです。ところが実運用のAGVは、差動二輪のような連続時間の運動学と速度・加速度制約の下で動作し、ネットワーク越しに指示を受け、動作完了時刻にはばらつきも生じます。さらに、生涯型では計画と実行が並列に進むため、「いつ計画器を呼び出すか」自体が性能に影響し、単に逐次に問題を解くだけでは済みません。加えて、計画器には時間制限が置かれ、解が返らない可能性や、衝突を含む中間解しか得られない可能性も現実的に考える必要があります。…
核心:何を提案したのか
本論文が提示する中心提案は、Lifelong Scalable Multi-Agent Realistic Testbed(LSMART)というオープンソースのシミュレータです。LSMARTは、中央集権・生涯型のフリート管理システムにおいて、任意の多エージェント経路探索アルゴリズムを評価できるように設計されています。評価対象は、2次元の長方形ワークスペースを格子状セルに分割し、一部セルは障害物として通行不可とする環境でのAGV群の運用です。各AGVは最大1セルを占有し、セル内で待機または回転し、隣接セルへ移動できます。衝突は、同一セルの同時占有、または時間区間が重なるセル交換として扱われ、離散モデルの衝突概念を実行時の時間区間に拡張しています。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related