Faramesh:自律型エージェントシステムのためのプロトコル非依存な実行制御プレーン
Farameshは、自律型エージェントがインフラ操作や資金移動などの現実的な影響を及ぼす際に、実行の直前で強制的に認可を判断する「アクション認可境界(AAB)」を導入する画期的な制御プレーンである。
TL;DR(結論)
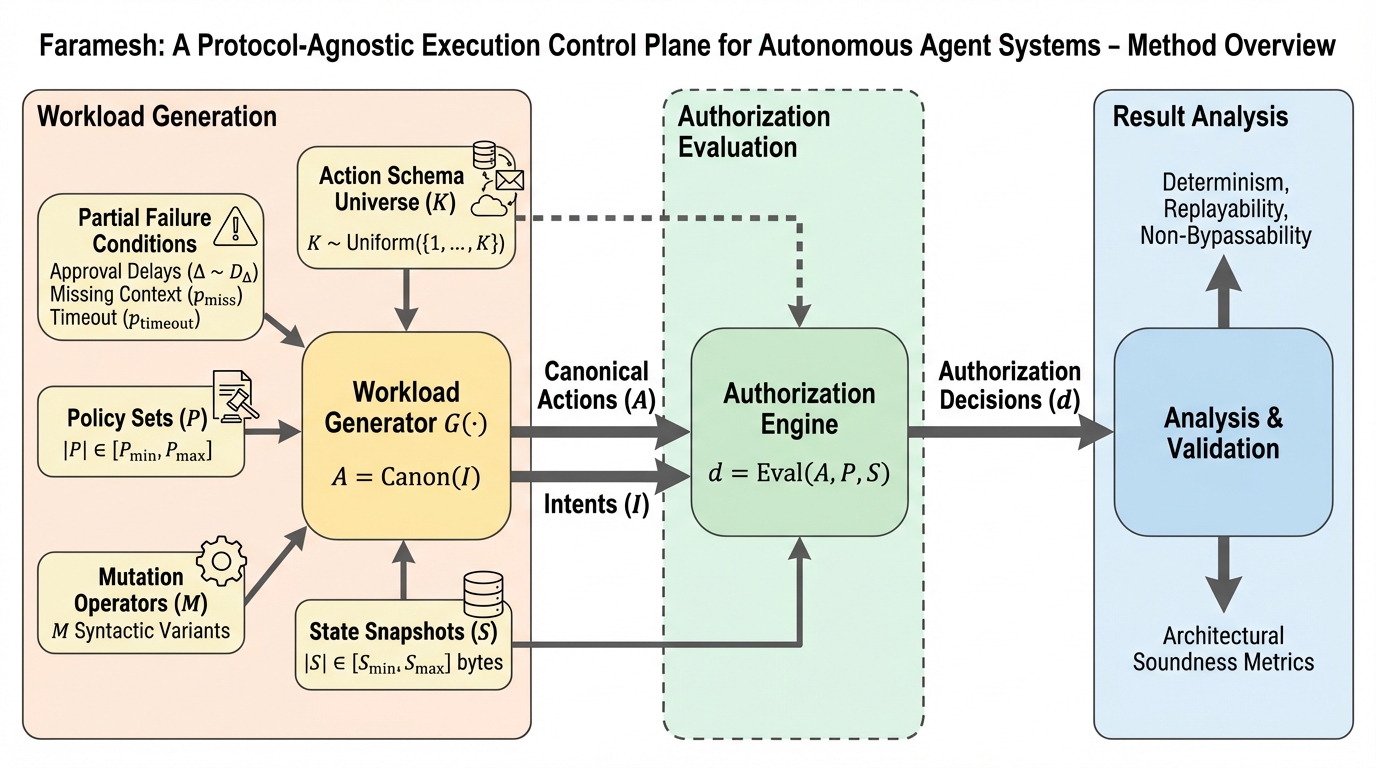
Farameshは、自律型エージェントがインフラ操作や資金移動などの現実的な影響を及ぼす際に、実行の直前で強制的に認可を判断する「アクション認可境界(AAB)」を導入する画期的な制御プレーンである。エージェントの意図をフレームワークに依存しない標準アクション表現(CAR)へと正規化し、現在のシステム状態とポリシーに照らして決定論的に評価することで、許可や拒否といった明確な判断を下す仕組みを構築している。このアーキテクチャは、認可の証跡となる成果物がない限り実行を許さない非バイパス性と、障害時に動作を停止するフェイルクローズの特性を備えており、既存のプロトコルでは到達できなかった高度な統治と再現性を実現する。
なぜこの問題か
自律型AIシステムは、単なるテキスト生成を行う推論エンジンから、APIの呼び出しやインフラの変更、資金移動、ワークフローの実行などを伴う能動的なエージェントへと急速に進化している。推論は情報の生成に留まるが、実行は現実世界に対して永続的かつ不可逆的な副作用をもたらすため、この移行はシステムのリスク特性を根本的に変化させている。しかし、既存のAI技術スタックの多くは、推論と実行を連続したものとして扱っており、エージェントが提案したアクションが実際に安全に実行可能かどうかを、実行の瞬間に強制的に検証するチェックポイントが欠如している。現在のガバナンスメカニズムは人間が介在することを前提として設計されているが、エージェントは機械的な速度で複雑な多段階の計画を提案し実行するため、人間の判断速度ではそのすべてに介入することができないという構造的なギャップが生じている。 既存のアイデンティティ管理(IAM)は「誰が」行動できるかを定義するが、特定の「アクションのインスタンス」がその時の状況において実行されるべきかどうかを判断するものではない。また、監視システムは実行後の結果を記録するだけであり、事前の防止には寄与しない。…
核心:何を提案したのか
本論文は、エージェントの推論空間と現実の実行環境の間に配置される、強制的で回避不可能な「アクション認可境界(AAB)」を中心とした形式的なアーキテクチャを提案している。このアーキテクチャの核心は、エージェントが生成した提案を「標準アクション表現(CAR)」へと決定論的に正規化し、プロトコルやフレームワークに依存しない形でアクションを評価することにある。AABは、この標準化されたアクション、ポリシーのコンテキスト、およびシステムの状態を入力として受け取り、許可(PERMIT)、保留(DEFER)、拒否(DENY)のいずれかの決定を下す決定論的な認可関数として機能する。 認可が下された場合、システムは暗号的に保護された「決定成果物」を発行し、実行者はこの成果物を検証しなければアクションを開始できない仕組みとなっている。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related