布操作学習における知覚と推論の分離によるデータ効率の向上
布操作という高次元で複雑な課題に対し、知覚と推論のプロセスを分離することで、学習効率とモデルの軽量化を同時に実現する新しいフレームワークを提案している。シミュレーション内の完全な状態情報を活用して「最適なエージェント」を訓練し、その知識を視覚ベースの現実世界用モデルへと「クロスモダリティ蒸留」によって転移させる手法を確立した。既存のベンチマークにおいて、従来手法よりもモデルサイズを95%削減しながら、性能を21%向上させることに成功し、大規模なデモンストレーションなしでの効率的な学習が可能であることを証明した。
TL;DR(結論)
布操作という高次元で複雑な課題に対し、知覚と推論のプロセスを分離することで、学習効率とモデルの軽量化を同時に実現する新しいフレームワークを提案している。シミュレーション内の完全な状態情報を活用して「最適なエージェント」を訓練し、その知識を視覚ベースの現実世界用モデルへと「クロスモダリティ蒸留」によって転移させる手法を確立した。既存のベンチマークにおいて、従来手法よりもモデルサイズを95%削減しながら、性能を21%向上させることに成功し、大規模なデモンストレーションなしでの効率的な学習が可能であることを証明した。
なぜこの問題か
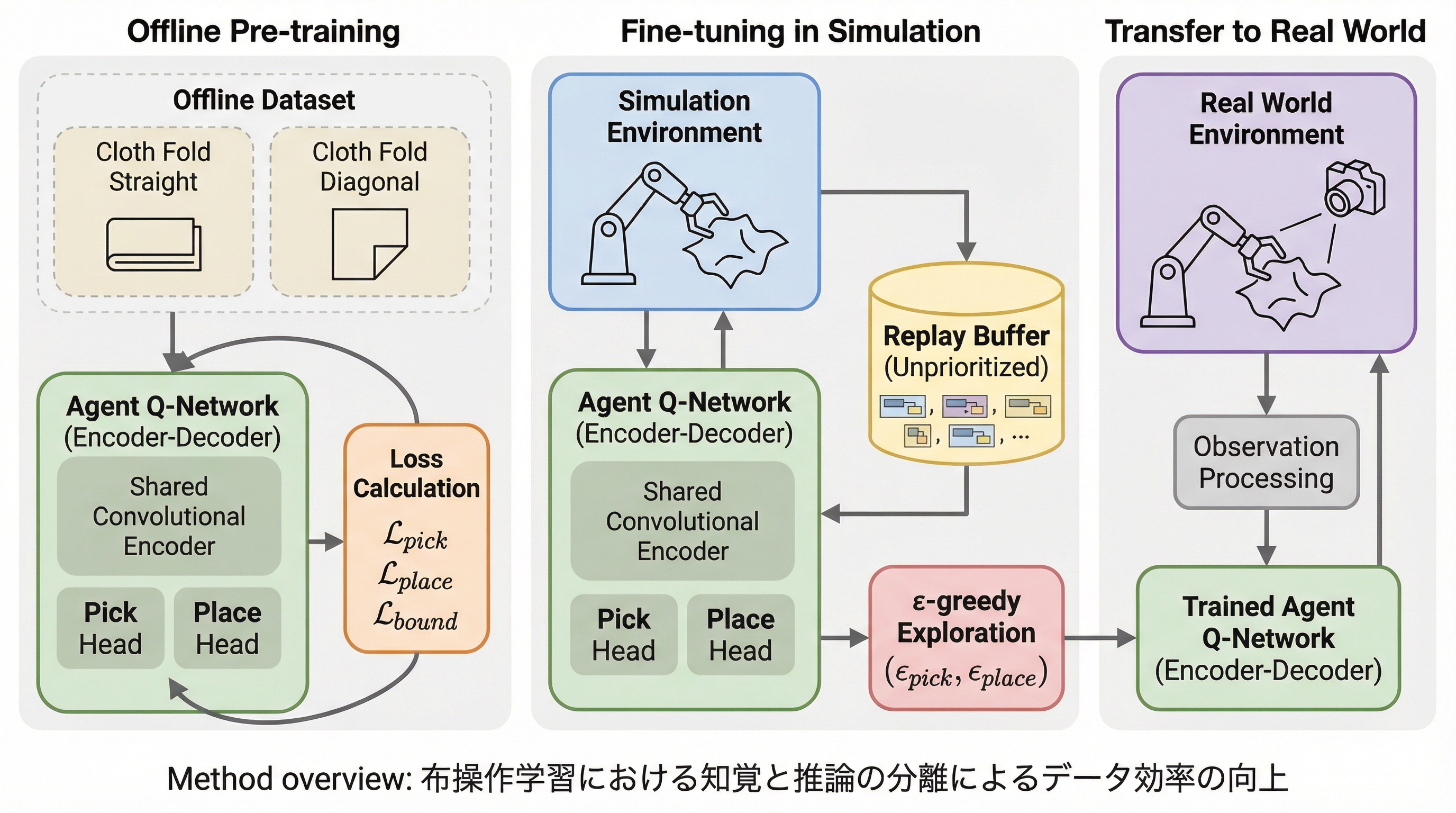
日常生活における布の操作は、ロボット工学において依然として解決されていない大きな課題の一つである。布は形状が定まらない柔軟な物体であり、その状態空間は極めて高次元であることに加え、自己遮蔽が発生しやすく、動力学的な挙動も非線形で複雑である。高齢化社会が進む中で、日常生活動作(ADL)を支援するロボットの需要は高まっているが、硬い物体や関節を持つ物体の操作に比べて、布のような変形する物体の操作技術は大きく遅れている。従来の深層学習や強化学習を用いたアプローチでは、これらの課題に対処するために巨大なモデルと膨大な訓練時間を必要としてきた。特に、計算コストの増大は手法の開発や普及を妨げる大きな要因となっている。 また、多くの既存手法はワークスペースの画像を入力とするエンドツーエンドの学習を採用している。この方式はシミュレーションから現実世界への転移を概念的には容易にするが、知覚、探索、推論のプロセスが密結合しており、どの要素が性能に寄与しているのかを特定することが困難であった。さらに、画像ベースの学習は環境状態の表現において情報損失が大きく、エージェントの訓練に多大な計算負荷を強いることになる。…
核心:何を提案したのか
本論文の核心は、布操作の学習において知覚と推論を明確に分離し、シミュレーションで得られた「完全な状態」に基づく知識を現実世界の視覚モデルへと転移させる新しい学習フレームワークの提案である。このフレームワークは、主に4つの原則に基づいている。第一に、ヒューリスティックなロールアウトを用いたオフラインの事前学習により、多様な構成空間を効率的に埋めることである。これにより、ゼロから探索を開始するよりも遥かに効率的に、布の多様な形状変化をモデルに学習させることが可能になる。第二に、構造化された補助的な目的関数を導入した多目的訓練により、頑健な潜在表現を促進することである。単に布を広げるという報酬だけでなく、特定の形状に畳むといった補助タスクを課すことで、モデルは布の幾何学的な特徴をより深く理解できるようになる。 第三の原則は、完全な幾何学的情報を利用する「全状態の活用」である。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related