ニューラル予測子・修正子:強化学習によるホモトピー問題の解決
ホモトピー法は、単純な問題の解を複雑なターゲット問題へと連続的に変形させながら追跡する強力な枠組みであるが、従来のソルバーはステップサイズや反復終了条件を人間が設計した固定的なルールに依存しており、効率性と汎用性に限界があった。
TL;DR(結論)
ホモトピー法は、単純な問題の解を複雑なターゲット問題へと連続的に変形させながら追跡する強力な枠組みであるが、従来のソルバーはステップサイズや反復終了条件を人間が設計した固定的なルールに依存しており、効率性と汎用性に限界があった。本研究では、このプロセスをマルコフ決定過程として定式化し、強化学習を用いて最適な制御ポリシーを自動的に獲得する「ニューラル予測子・修正子(NPC)」を提案することで、問題の動的な性質に応じた適応的な意思決定を可能にした。頑健最適化、大域最適化、多項式の根の探索、サンプリングという4つの異なる領域で検証した結果、提案手法は従来の専門的なベースラインを計算効率と数値的安定性の両面で一貫して上回り、未知のデータに対しても追加学習なしで高い性能を発揮することが確認された。
なぜこの問題か
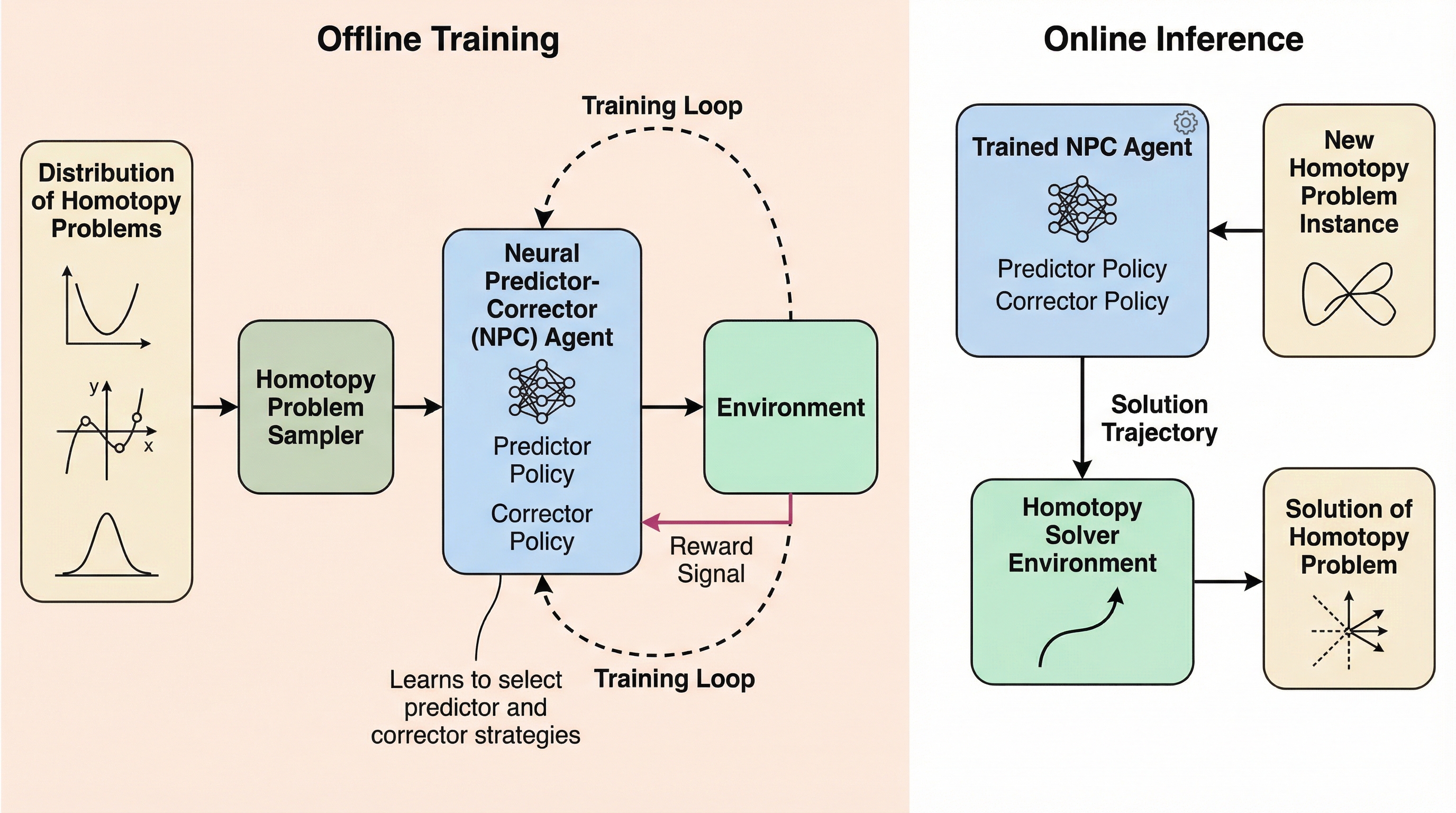
ホモトピー・パラダイムは、直接解くことが困難な複雑な問題に対して、既知の解を持つ単純なソース問題からターゲット問題への連続的な補間(ホモトピー補間)を定義し、その軌跡を追跡することで解を得る一般的な原理である。この手法は、頑健最適化における段階的非凸緩和(GNC)や、大域最適化におけるガウス・ホモトピー、多項式システムの根を求めるホモトピー連続法、さらには複雑な分布からサンプリングを行うアニールド・ランジュバン動力学など、極めて多岐にわたる分野で利用されている。実用的なソルバーは通常、次のホモトピー・レベルを決定して解を推定する「予測子(Predictor)」と、その推定値を真の軌跡に引き戻すために反復計算を行う「修正子(Corrector)」の二段階構造(PC構造)を採用している。 しかし、従来のPCソルバーには重大な課題が存在していた。それは、予測子がどれだけホモトピー・レベルを進めるかという「ステップサイズ」や、修正子がいつ計算を終了するかという「終了条件」の決定が、人間が経験的に設計したヒューリスティックなルールに依存している点である。…
核心:何を提案したのか
本研究の核心的な提案は、ホモトピー問題の解決プロセスを逐次的な意思決定問題として捉え直し、強化学習(RL)を用いて予測子と修正子の動作を最適化する「ニューラル予測子・修正子(NPC)」という統一フレームワークを構築したことにある。NPCは、従来の固定的なアルゴリズムの代わりに、ニューラルネットワークによってパラメータ化された適応的なポリシーを採用する。これにより、問題の現在の状態や過去の収束状況を考慮しながら、リアルタイムで最適なステップサイズや修正の許容誤差を決定することが可能になった。このアプローチは「プラグアンドプレイ」として設計されており、既存の様々なホモトピー法に容易に組み込むことができる汎用性を備えている。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related