オンデマンド・エアタクシーサービスのための異種垂直離着陸場選択の最適化:深層強化学習によるアプローチ
都市部の深刻な交通渋滞を解消するため、電動垂直離着陸機(eVTOL)と地上交通を統合管理し、深層強化学習とV2X通信を活用して乗客ごとに最適な離着陸場(バーティポート)を動的に割り当てる「UAGMC」フレームワークを提案しました。
TL;DR(結論)
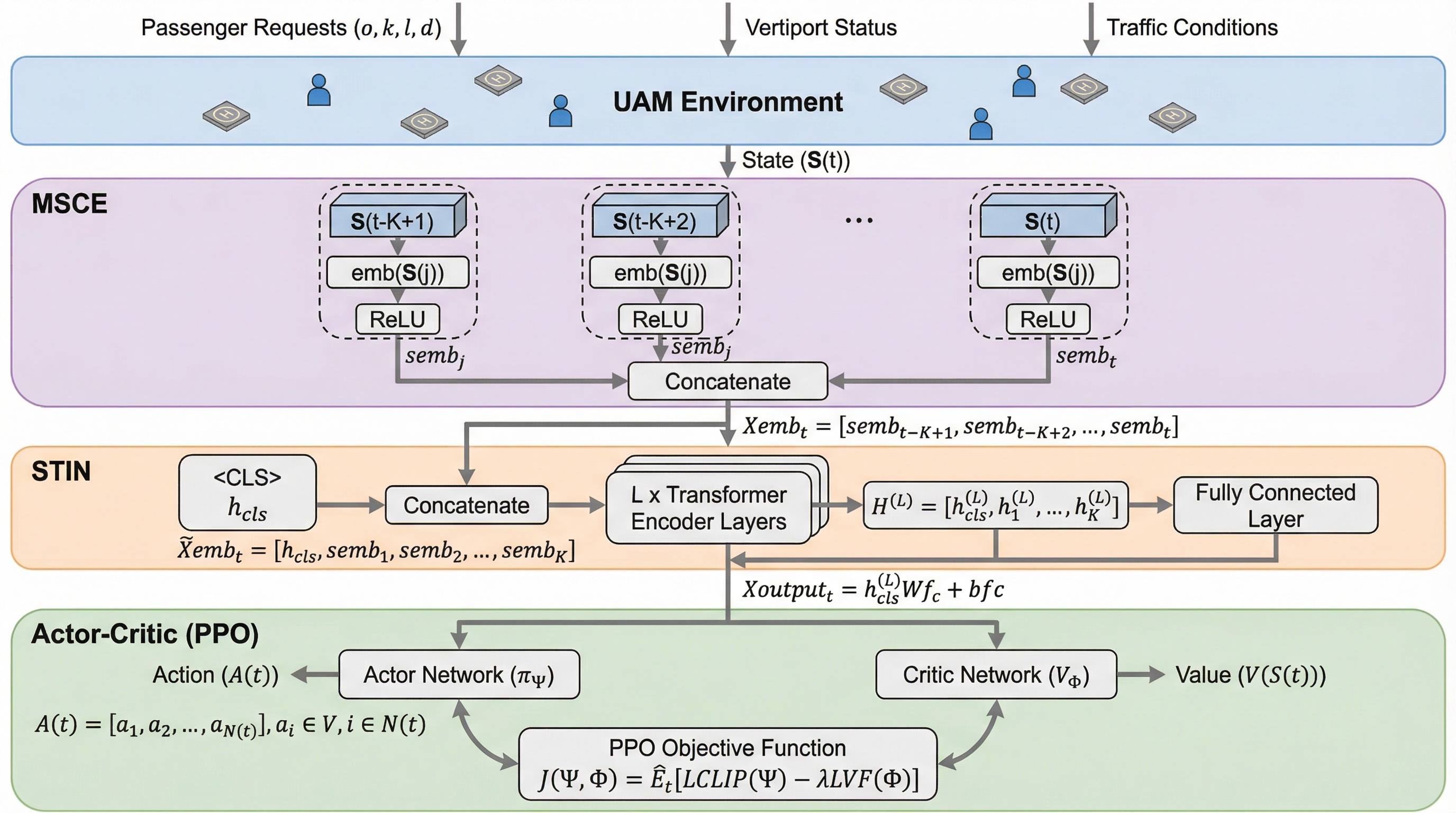
都市部の深刻な交通渋滞を解消するため、電動垂直離着陸機(eVTOL)と地上交通を統合管理し、深層強化学習とV2X通信を活用して乗客ごとに最適な離着陸場(バーティポート)を動的に割り当てる「UAGMC」フレームワークを提案しました。 このシステムは、マルチソース・コンテキスト・エンベディング(MSCE)と時空間統合ネットワーク(STIN)を導入することで、リアルタイムの混雑状況や各施設の処理能力を高度に分析し、地上と空を跨ぐドア・ツー・ドアの移動経路を最適化する仕組みを構築しています。 シミュレーションによる検証の結果、従来の比例配分方式と比較して平均旅行時間を34%削減することに成功し、特定の施設への集中を避ける混雑回避型の意思決定が、将来のスマートシティにおけるマルチモーダル輸送の効率を劇的な向上させることを実証しました。
なぜこの問題か
世界的な都市化の加速に伴い、大都市圏では交通渋滞、環境汚染、人口過密といった深刻な社会問題が噴出しており、特に通勤時間の増大は経済活動に大きな負の影響を与えています。統計データによれば、都市人口の約30%が毎日の通勤に60分以上を費やしているという現状があり、既存の二次元的な地上交通網の拡張だけでは、増大し続ける輸送需要に対応することが物理的な限界に達しています。このような背景から、未利用の低空域を三次元的に活用するアーバン・エア・モビリティ(UAM)が、持続可能な都市交通の新たな解決策として世界的に注目されています。特に電動垂直離着陸機(eVTOL)を用いたエアタクシーは、渋滞を回避し、炭素排出を抑えながら都市の連結性を高める鍵として、UberやEhang、NASAといった主要な組織によって研究が進められています。 しかし、エアタクシーの運用を実用化するためには、特有の制約を克服しなければなりません。eVTOLは乗客定員が2名から5名と非常に少なく、離着陸には「バーティポート」と呼ばれる固定施設が不可欠です。…
核心:何を提案したのか
本研究では、地上交通と航空交通を一つの意思決定メカニズムの中に統合し、出発地から目的地までの全行程を最適化する「統一航空・地上モビリティ調整(UAGMC)」フレームワークを提案しました。このフレームワークの最大の特徴は、コネクテッド自動運転車(CAV)による地上輸送と、eVTOLによるエアタクシーサービスを高度に連携させている点にあります。具体的には、乗客の移動リクエストが発生した際に、システムがリアルタイムで最適な出発バーティポートと到着バーティポートのペアを選択し、地上と空のルートを動的に計画します。この複雑な最適化問題を解決するために、深層強化学習の中でも特に安定性と効率性に優れたアクター・クリティック(Actor-Critic)アルゴリズムを採用し、大規模な状態空間と行動空間における学習を可能にしました。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related