マルチエージェント・ロボットシステム(MARS)チャレンジにおける進歩と革新
複雑なタスクを解決するため、複数のロボットが協力するマルチエージェント・ロボットシステム(MARS)チャレンジが提案された。この競技会は、視覚言語モデル(VLM)を用いた高レベルな「プランニング」と、物理シミュレーション環境での低レベルな「制御」の2つのトラックで構成されている。
TL;DR(結論)
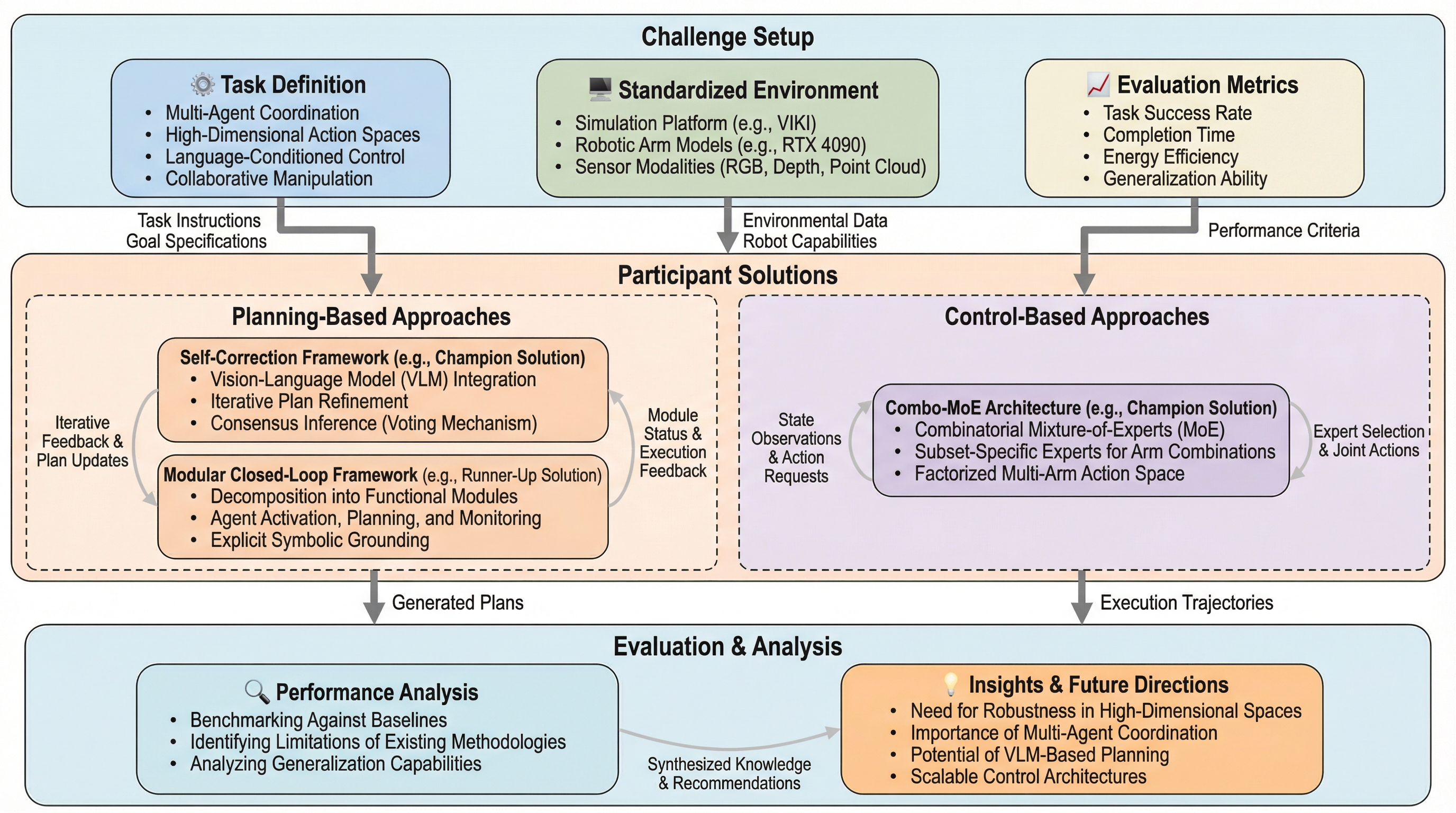
複雑なタスクを解決するため、複数のロボットが協力するマルチエージェント・ロボットシステム(MARS)チャレンジが提案された。この競技会は、視覚言語モデル(VLM)を用いた高レベルな「プランニング」と、物理シミュレーション環境での低レベルな「制御」の2つのトラックで構成されている。プランニングでは異種のロボットを選択し効率的な行動シーケンスを生成する能力が評価され、制御では複数のロボットアームによる協調操作が課題となった。 検証の結果、プランニングにおいては自己修正フレームワークやモジュール化された閉ループシステムなどの革新的な手法が登場し、一定の成果を収めた。しかし、制御トラックにおいては、3台以上のロボットアームが関与する高度な協調タスクにおいて、既存のモデルの成功率が著しく低いことが明らかになった。これは、高次元の行動空間における探索の難しさや、リアルタイムな相互作用の複雑さが依然として大きな技術的障壁であることを示している。 本チャレンジは、身体化されたマルチエージェント・システムの設計と調整に関する貴重な知見を提供し、将来の高度な協調型AIシステムの開発に向けた重要な一歩となった。特に、プランニングとコントロールを分離して評価することで、現在の技術の到達点と限界が明確に定義された。今後は、より堅牢な分散制御や、プランニングとコントロールの高度な統合、そして未知のシナリオに対する汎用性の向上が、この分野における次なる重要な研究課題となる。
なぜこの問題か
近年、マルチモーダル大規模言語モデルや視覚・言語・行動モデルの進歩により、エンボディドAI(身体化された人工知能)の分野は飛躍的な発展を遂げてきた。しかし、研究の焦点がより複雑なタスクシナリオへと移行するにつれ、単一のエージェントだけでは対応が困難な状況が増えている。そこで、拡張性が高く効率的で、かつ協調的な解決策を実現するために、マルチエージェント・システムの枠組みが不可欠となっている。この移行を後押ししている主な要因は3つある。第一に、個々のエージェントの能力向上に伴い、それらをマルチエージェントの枠組みでスケールアップさせることで、より複雑で多才なシステムを構築できる点である。第二に、システム全体の効率性である。単一のエージェントは特定のタスクに制約されることが多いが、マルチエージェント・システムではタスクを複数のエージェントに委譲することで、全体の処理効率を大幅に高めることが可能になる。第三に、高度な人間とエージェントの相互作用の実現である。身体化されたマルチエージェント・システムが進化することで、人間とロボットがより広範なタスクで協力し合える道が開かれる。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related