不整合な動作事前知識からのタスク中心の方策最適化
ヒューマノイドロボットの制御において、人間の動作データを模倣する手法は自然な動きを実現する一方で、ロボットの身体構造との違いやタスクとの不整合により、単純な模倣がタスク性能を著しく低下させるという深刻な課題がありました。
TL;DR(結論)
ヒューマノイドロボットの制御において、人間の動作データを模倣する手法は自然な動きを実現する一方で、ロボットの身体構造との違いやタスクとの不整合により、単純な模倣がタスク性能を著しく低下させるという深刻な課題がありました。 本研究が提案する「タスク中心動作プライア(TCMP)」は、模倣をタスクと同等の目的ではなく「条件付きの正則化」として扱い、タスクの改善を最優先しながら、タスクの進展と幾何学的に両立する場合にのみ模倣信号を取り入れる新しい最適化フレームワークです。 最新のヒューマノイドロボットであるUnitree G1を用いた実験では、デモンストレーションにノイズや不整合が含まれる過酷な状況下でも、タスク性能を損なうことなく物理的に一貫性のある自然な動作スタイルを獲得し、実機への安定した転用が可能であることを証明しました。
なぜこの問題か
ヒューマノイドロボットの制御は、高次元のダイナミクス、地面や物体との頻繁な接触、そして複雑なタスク設計が必要となるため、ロボット工学における最も困難な領域の一つです。純粋な強化学習のみを用いて報酬を設計しようとすると、たとえタスク自体は達成できたとしても、人間から見て不自然な姿勢や、物理的に不安定な挙動、あるいは激しい振動が生じることが多々あります。これを解決するために、人間の動作キャプチャデータを「動作プライア」として活用し、ロボットに自然な振る舞いを促す手法が一般的になっています。しかし、現実のロボット運用環境において、人間のデモンストレーションデータが常に高品質で、ロボットの仕様に完全に合致しているとは限りません。 人間の動作データは、通常、モーションキャプチャシステムやビデオ映像からの復元によって得られますが、これをロボットに適用する際には、身体構造(エンボディメント)の違い、センシング時のノイズ、そしてリターゲティング(動作転写)に伴う誤差といった避けられない問題が発生します。…
核心:何を提案したのか
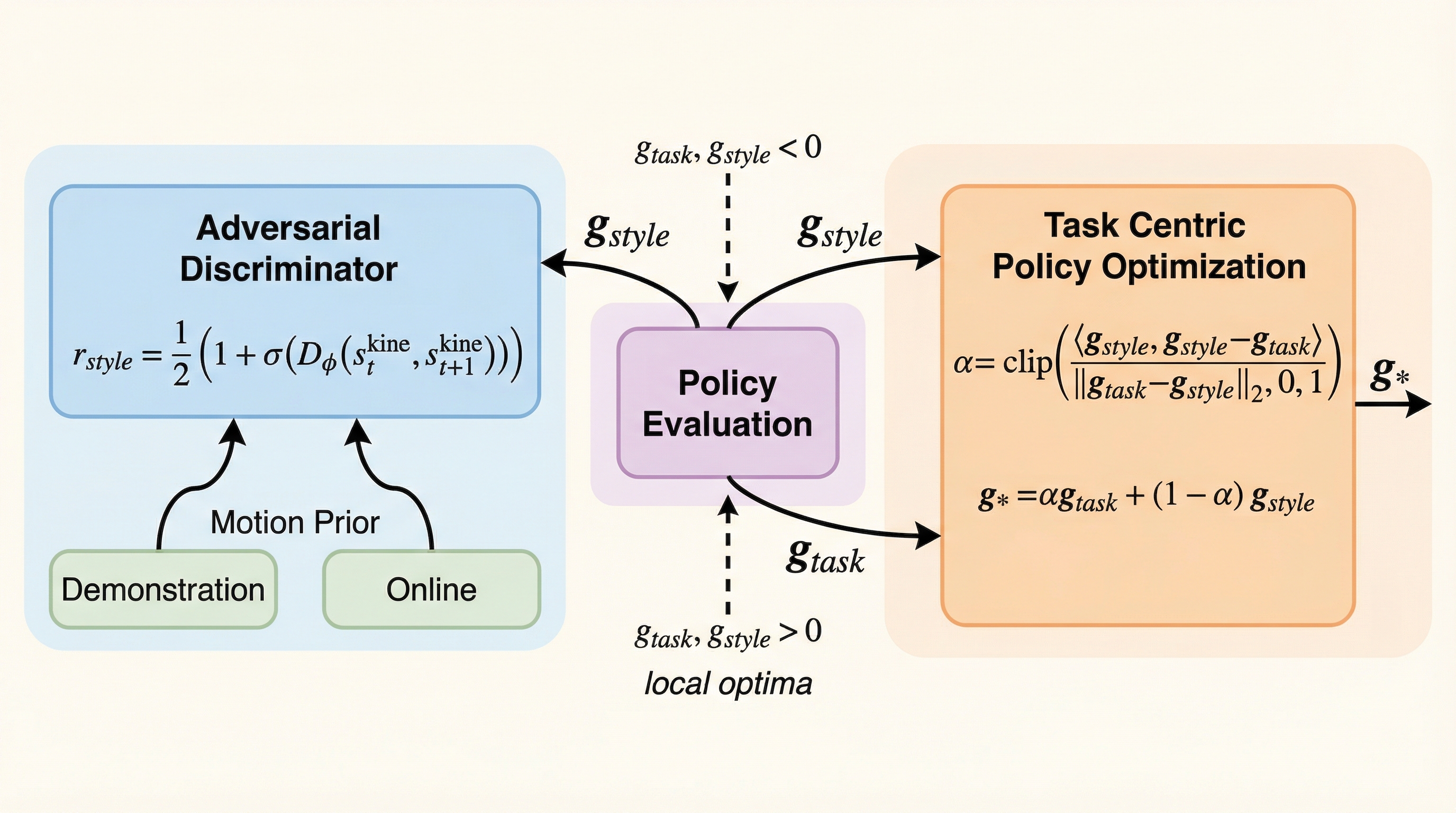
本研究では、動作プライアの統合を「タスク優先の一次制約付き最適化問題」として再定義する「タスク中心動作プライア(TCMP)」というフレームワークを提案しています。これは、模倣をタスクと対等な目的関数として扱うのではなく、タスクの改善を妨げない範囲で適用される「条件付き正則化」として定義するものです。このアプローチの核心は、タスクの向上を常に保証しつつ、局所的にタスクの進展と互換性がある場合にのみ模倣信号を政策の更新に組み込むという点にあります。これにより、不完全なデータが学習を阻害することを物理的に防いでいます。 具体的には、タスクの勾配と模倣の勾配を幾何学的に分析し、両者が衝突しているかどうかを各ステップで判断します。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related