PHDME: 明示的な支配方程式を必要としない物理情報に基づいた拡散モデル
複雑な動的システムの予測において、従来の物理情報に基づく機械学習は明示的な支配方程式を必要としていたが、本研究では方程式が未知または不完全な場合でも適用可能なPHDMEという新しい拡散モデルの枠組みを提案している。
TL;DR(結論)
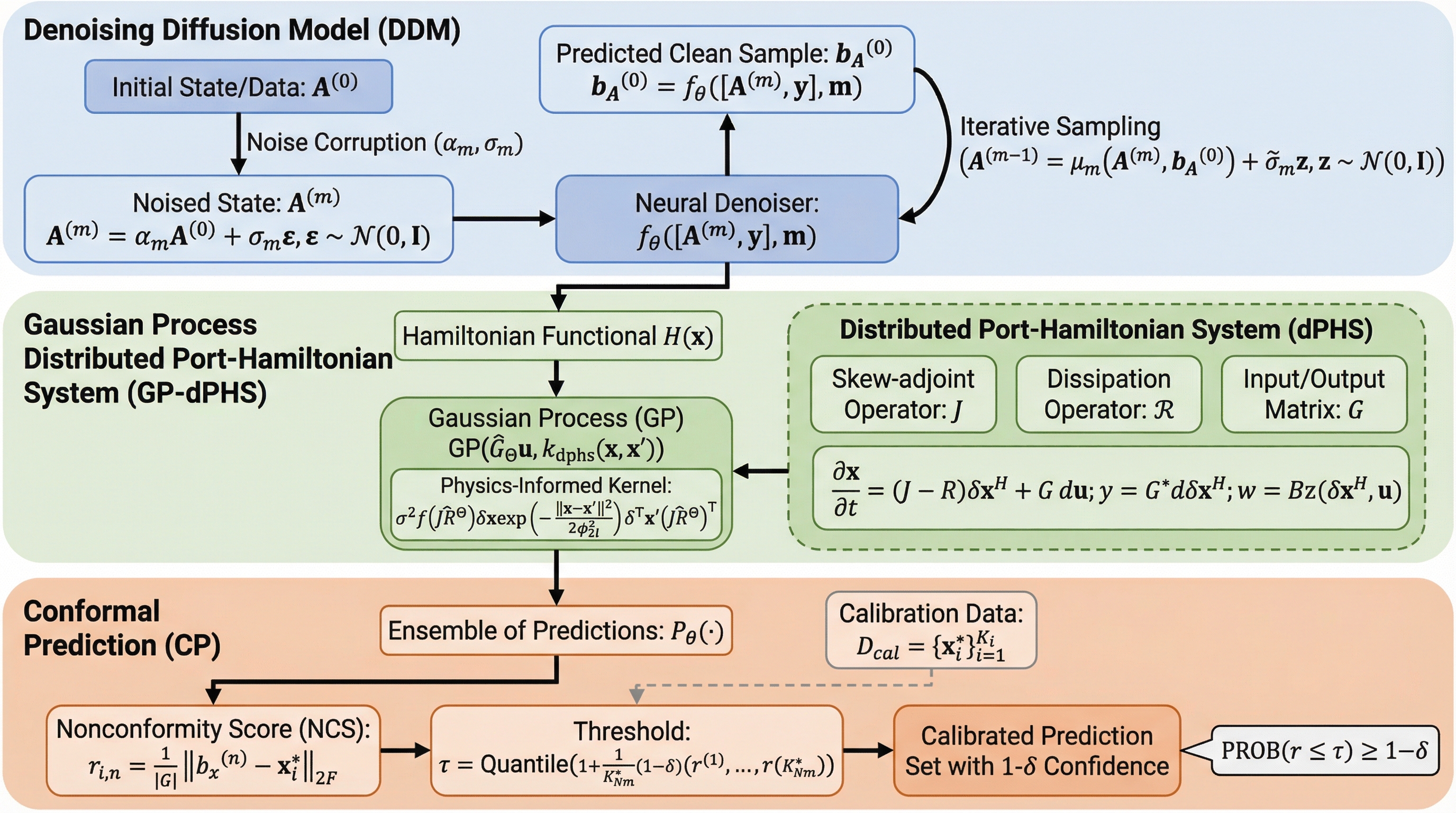
複雑な動的システムの予測において、従来の物理情報に基づく機械学習は明示的な支配方程式を必要としていたが、本研究では方程式が未知または不完全な場合でも適用可能なPHDMEという新しい拡散モデルの枠組みを提案している。 この手法はガウス過程分散ポート・ハミルトン系(GP-dPHS)を用いて、限られた観測データからシステムのエネルギーベースの表現を学習し、その物理的構造を拡散モデルの学習プロセスに統合することで、データの希少性と物理的な整合性の両立を実現している。 学習された拡散モデルは高速な軌道生成を可能にするアモータイズド・サンプラーとして機能し、さらにコンフォーマル予測を適用することで生成された予測値に対して統計的な不確実性の保証を提供し、実世界のバネシステムや偏微分方程式のベンチマークで高い精度を示している。
なぜこの問題か
複雑な動的システムの進化を予測することは、政策設計や衝突回避、長期的な計画立案において中心的な役割を果たしている。しかし、システムの動態が高い非線形性を持つ場合や、観測データが極めて限定的で疎な場合には、正確な予測を行うことが依然として大きな課題となっている。例えば、ソフトロボットの操作器などは非線形性が非常に強く、センサーの数も限られているため、その挙動をモデル化することは困難を極める。正確な予測には通常、非線形偏微分方程式(PDE)を解く必要があるが、これは一次元の簡略化されたモデルであっても計算コストが非常に高く、実際には正確な支配方程式自体が未知であることも少なくない。 既存の深層学習フレームワークとして、Neural ODEやNeural PDEなどが提案されているが、これらは膨大な計算コストを要し、大量のデータを必要とする傾向がある。計算コストは予測期間が長くなるほど増大し、実行時間やメモリ使用量の増加を招くため、モデルの忠実度や空間解像度を犠牲にせざるを得ない場合がある。…
核心:何を提案したのか
本研究では、非常に限られた訓練データから、高速かつ物理的に信頼性の高い多段階の動的予測を行うためのフレームワークであるPHDMEを提案している。この手法の核心は、明示的な支配方程式を必要とせずに、システムの構造的な物理的事前知識を活用する点にある。具体的には、ガウス過程分散ポート・ハミルトン系(GP-dPHS)を基盤として構築されており、ポート・ハミルトン構造の事前知識を利用することで、複雑で非線形な動態に対しても物理的な整合性を保った表現を学習する。GP-dPHSは、ハミルトニアンの勾配やエネルギー密度の閉形式をあらかじめ知ることなく、限られた観測データから未知のエネルギー関数を学習することが可能である。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related