JADE: 動的なAgentic RAGにおける戦略と実行のギャップを埋める
従来の動的な検索拡張生成(RAG)システムでは、高度な計画を立案するプランナーと、実際のタスクを遂行する実行器が分離されていたため、計画が実行器の能力を超えたり、実行器が計画の意図を汲み取れなかったりする「戦略と実行のミスマッチ」が大きな課題となっていた。
TL;DR(結論)
従来の動的な検索拡張生成(RAG)システムでは、高度な計画を立案するプランナーと、実際のタスクを遂行する実行器が分離されていたため、計画が実行器の能力を超えたり、実行器が計画の意図を汲み取れなかったりする「戦略と実行のミスマッチ」が大きな課題となっていた。 提案された新フレームワーク「JADE(Joint Agentic Dynamic Execution)」は、単一の大規模言語モデル(LLM)を基盤としてプランナーと実行器を統合し、共通の報酬系を用いて両者を共同で最適化することで、プランナーが実行器の限界を理解し、実行器が戦略的意図に沿って進化する「共適応」を実現した。 検証の結果、JADEを適用した7B(70億パラメータ)サイズのモデルは、GPT-4oをプランナーとして利用した既存の分離型システムを7つのベンチマークすべてで上回る性能を達成し、複雑な推論タスクにおいてはモデルの物理的な規模よりも、構成要素間の協調的な相乗効果が極めて重要であることを実証した。
なぜこの問題か
検索拡張生成(RAG)の技術は、単純な検索と生成のパイプラインから、中央のプランナーが多段階の推論を制御する動的なエージェント型ワークフローへと急速に進化している。しかし、既存の最適化手法には深刻な二分化が存在しており、これが性能向上の障壁となっていた。一つは、固定されたグラフ構造の中でモジュールを共同最適化する「静的共同最適化」であるが、これは複雑なクエリに対して柔軟な推論経路を構築できず、適応性に欠けるという問題がある。もう一つは、プランナーに動的な計画権限を与える一方で、実行器(リトリーバーやリーダーなど)を凍結されたブラックボックスとして扱う「動的分離最適化」である。 この分離された最適化アプローチは、本論文が「戦略と実行のミスマッチ」と定義する現象を引き起こす。プランナーは理論上は洗練された戦略を考案するが、それに対応するように調整されていない局所的な実行器がその戦略を具現化できず、システム全体の複雑さが増しているにもかかわらず、最終的な回答精度が低下するという事態を招く。…
核心:何を提案したのか
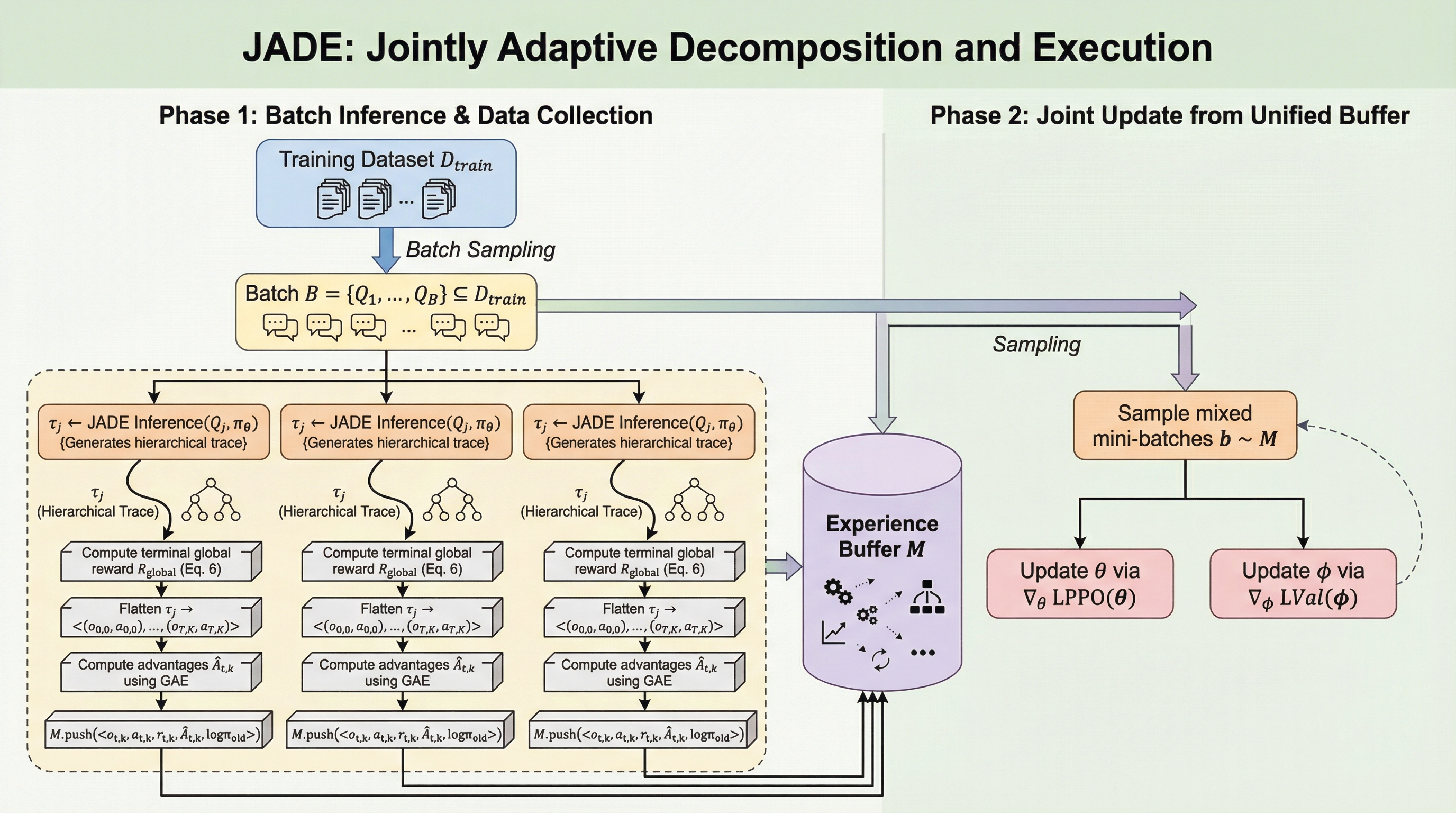
本論文は、動的な多段階ワークフロー内での計画と実行を共同で最適化するための統一フレームワーク「JADE(Joint Agentic Dynamic Execution)」を提案している。JADEの核心的なアイデアは、システムを単一の共有バックボーン(大規模言語モデル)の下で統合された、協調的なマルチエージェントチームとして再定義することにある。これにより、最終的な結果に基づいた報酬(Outcome-based rewards)によって駆動されるエンドツーエンドの学習が可能になり、従来のバラバラだったモジュール群を一つの有機的なシステムへと昇華させている。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related