液液分離における稠密充填層の高さ推定:物理情報に基づいたニューラルネットワークによるアプローチ
化学や製薬の工程で不可欠な液液分離において、装置の溢流を防ぐ鍵となる稠密充填層(DPZ)の高さは、光学的な制約により直接測定が困難で高価という課題がありました。本研究では、安価な流量データのみからフェーズ高さを推定するため、低忠実度の機構モデルによる事前学習と少量の実験データによる微調整を組み合わせた「物理情報ニューラルネットワーク(PINN)」を提案しました。このPINNを拡張カルマンフィルタ(EKF)に予測モデルとして組み込むことで、従来の純粋なデータ駆動型モデルや機構モデルを凌駕する精度で、動的なフェーズ高さの推移をリアルタイムに追跡することに成功しました。さらに、物理的な制約をモデルに持たせることで、学習データに含まれない未知の運転条件下でも安定した推定が可能となり、プロセスの安全性向上とコスト削減を両立する新たな監視手法としての有効性が示されました。
TL;DR(結論)
化学や製薬の工程で不可欠な液液分離において、装置の溢流を防ぐ鍵となる稠密充填層(DPZ)の高さは、光学的な制約により直接測定が困難で高価という課題がありました。本研究では、安価な流量データのみからフェーズ高さを推定するため、低忠実度の機構モデルによる事前学習と少量の実験データによる微調整を組み合わせた「物理情報ニューラルネットワーク(PINN)」を提案しました。このPINNを拡張カルマンフィルタ(EKF)に予測モデルとして組み込むことで、従来の純粋なデータ駆動型モデルや機構モデルを凌駕する精度で、動的なフェーズ高さの推移をリアルタイムに追跡することに成功しました。さらに、物理的な制約をモデルに持たせることで、学習データに含まれない未知の運転条件下でも安定した推定が可能となり、プロセスの安全性向上とコスト削減を両立する新たな監視手法としての有効性が示されました。
なぜこの問題か
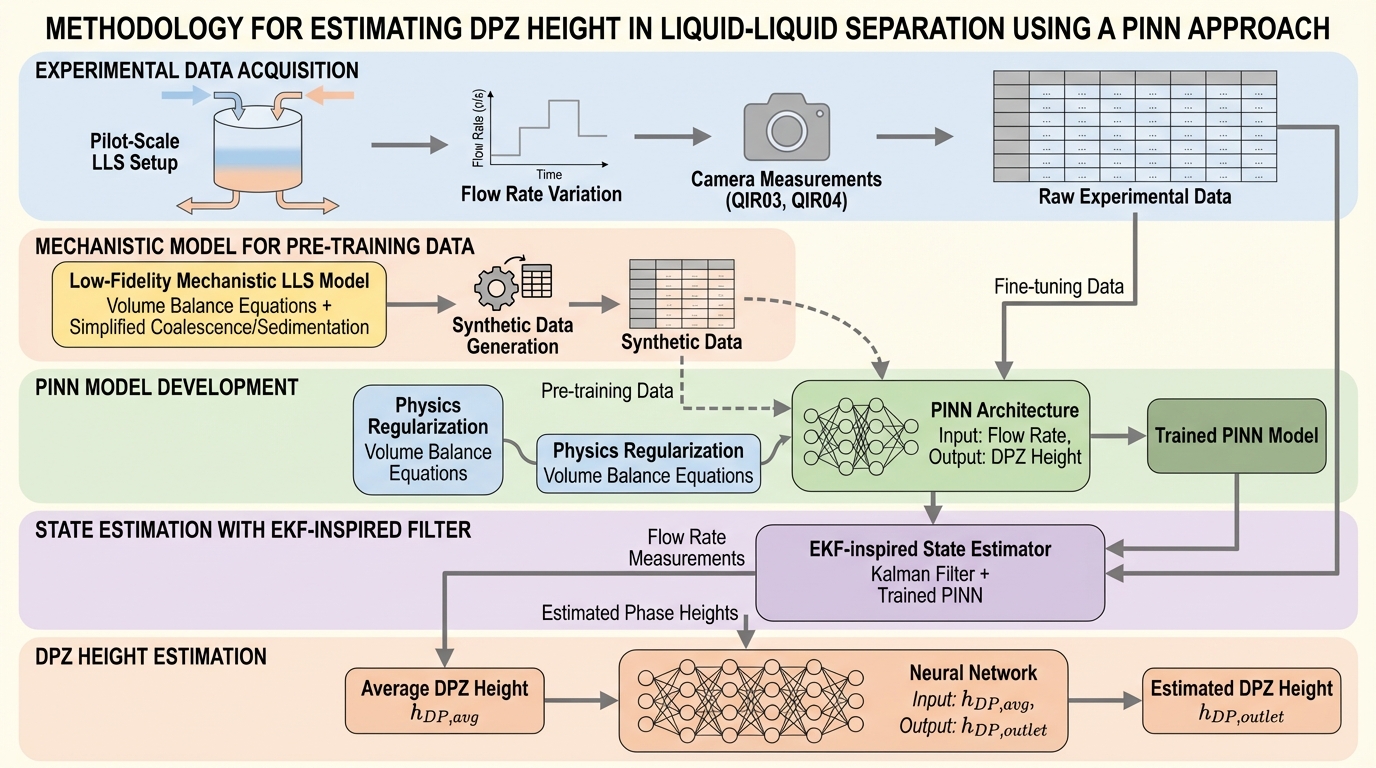
重力沈降槽における液液分散系の分離は、化学、製薬、およびリサイクルプロセスにおいて極めて重要です。高濃度充填層の高さは性能と安全性の重要な指標ですが、光学的な制限により、その測定は高価で実用的でないことが多々あります。我々は、安価な体積流量測定のみを用いて各相の高さを推定することを提案します。この目的を達成するため、膨大な実験データの必要性を減らすべく、低忠実度(近似的)なメカニスティックモデルから導出された合成データと物理方程式を用いて、物理情報に基づくニューラルネットワーク(PINN)をまず事前学習させます。メカニスティックモデルは合成訓練データの生成に使用されますが、液滴の合一や沈降を記述するサブモデルをPINNに統合することは計算負荷が非常に高くなるため、PINN内では体積収支式のみを使用します。その後、事前学習済みのPINNを、限られた実験データでファインチューニングし、分離槽の実際の動特性を捉えます。次に、微分可能なPINNを拡張カルマンフィルタに着想を得た状態推定フレームワークの予測モデルとして採用し、流量測定値から相の高さを追跡および更新できるようにします。…
核心:何を提案したのか
本研究の核心は、安価で容易に測定可能な「体積流量」のデータのみを使用して、分離器内部の目に見えないフェーズ高さを高精度に推定する新しいフレームワークを提案した点にあります。具体的には、物理法則の制約とデータ駆動型の柔軟性を融合させた「物理情報ニューラルネットワーク(PINN)」を採用しました。このPINNの学習には、データの希少性を克服するための「二段階トレーニング戦略」が導入されています。第一段階では、近似的で計算負荷の低い「低忠実度機構モデル」から生成された合成データと、物理的な体積収支式を用いて事前学習(プレトレーニング)を行います。これにより、モデルはまず物理的な基本原則を学習し、広範な実験データの必要性を大幅に軽減します。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related