エンティティ・アライメント基盤モデルにおける推論の地平を突破する
1. 従来のエンティティ・アライメント(EA)手法は未知の知識グラフに対して再学習が必要であり、既存のグラフ基盤モデルを適用しても、二つのグラフを跨ぐ際の「推論ホライゾン・ギャップ(推論の地平の乖離)」により精度が著しく低下するという課題があった。 2.
TL;DR(結論)
- 従来のエンティティ・アライメント(EA)手法は未知の知識グラフに対して再学習が必要であり、既存のグラフ基盤モデルを適用しても、二つのグラフを跨ぐ際の「推論ホライゾン・ギャップ(推論の地平の乖離)」により精度が著しく低下するという課題があった。
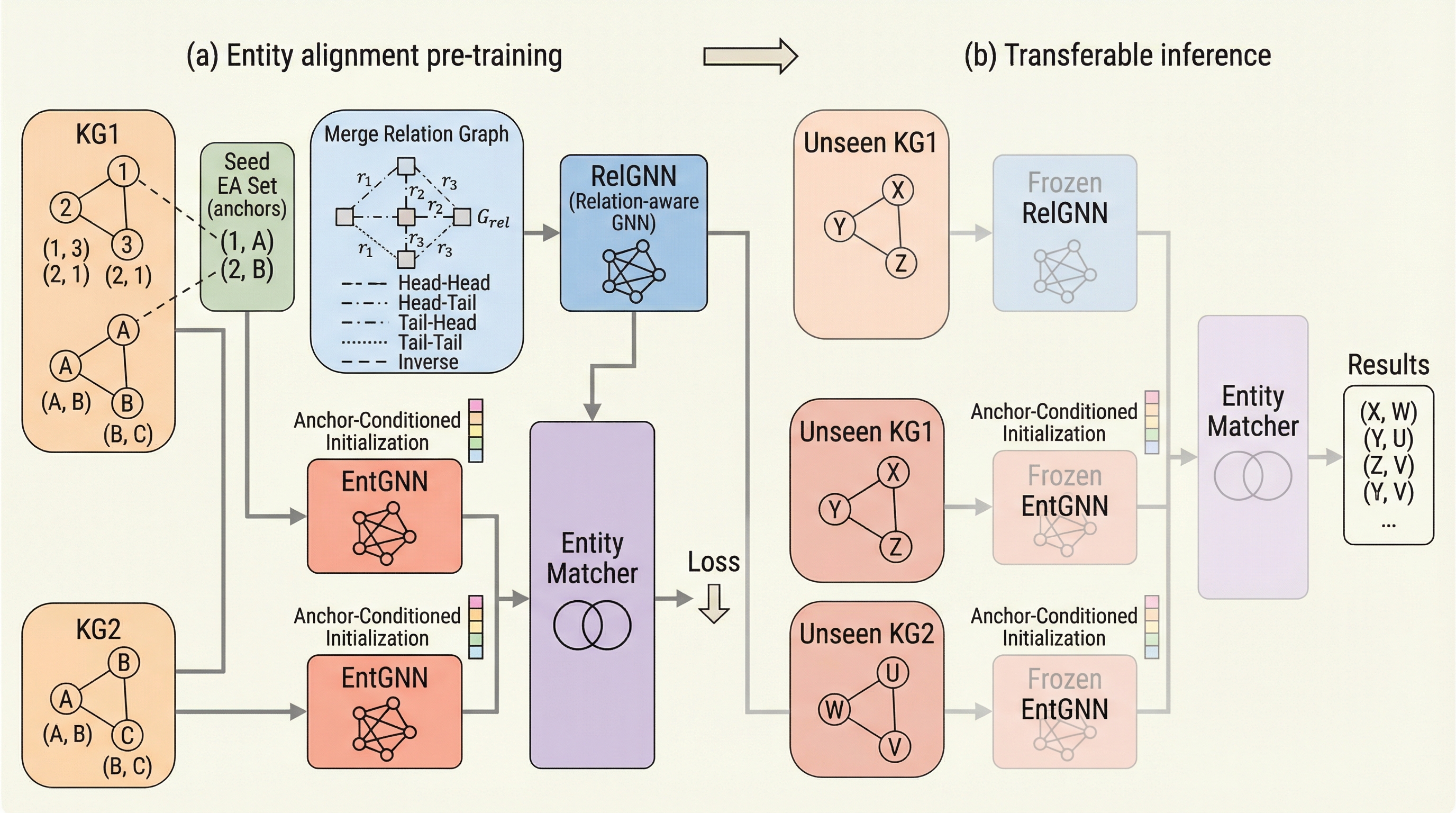
- 本研究が提案するEAFMは、既知の対応ペアを「ローカルアンカー」として活用する並列エンコーディング戦略を導入し、アンカー条件付きメッセージパッシングによって推論経路を大幅に短縮することで、広域的な探索を必要としない効率的かつ正確なアライメントを実現した。
- 実験の結果、EAFMは未知の知識グラフに対しても再学習や微調整なしで高い汎用性を示し、既存の最先端基盤モデルであるULTRAを大幅に上回るゼロショット性能を達成したことで、構造情報のみを用いた転移可能なエンティティ・アライメントの有効性を実証した。
なぜこの問題か
知識グラフ(KG)は、質問応答や推薦システムといった現代のAIアプリケーションを支える重要な基盤であるが、現実世界の知識グラフは異なるデータソースから独立して構築されることが多いため、命名規則やスキーマの不均一性が避けられない。エンティティ・アライメント(EA)は、これらの複数の知識グラフ間で同じ実体を指すエンティティを特定し、知識を統合するための核心的な技術である。しかし、既存の埋め込みベースのEA手法の多くは「トランスダクティブ(学習時と同じ対象を扱う)」な設定に依存しており、モデルのパラメータが特定のエンティティ集合に固執しているため、未知の知識グラフに対して直接転移することができないという致命的な制限がある。新しいEAタスクが発生するたびにモデルをゼロから再学習させる必要があり、これは計算コストと効率の両面で大きな障壁となっている。 近年、グラフ基盤モデル(GFM)が登場し、ノードの絶対的なIDではなく相対的な表現や普遍的なリレーションパターンを学習することで、未知のグラフへの転移可能性が示唆されている。…
核心:何を提案したのか
本研究は、未知の知識グラフに対しても再学習なしで高い精度を発揮する、エンティティ・アライメントのための基盤モデル「EAFM」を提案した。このモデルの最大の特徴は、シードEAペア(既知の対応関係)を「ローカルアンカー」として定義し、二つの知識グラフを同時に処理する「並列エンコーディング戦略」を採用した点にある。従来のモデルが広域的なグラフ構造を網羅的に探索してターゲットを探し出そうとするのに対し、EAFMは共有されたアンカーからの相対的な構造的近接性を利用することで、クエリエンティティからその対応相手までの推論経路を劇的に短縮する。このアプローチは、未知のエンティティに対しても絶対的なIDを必要とせず、構造的な役割のみに基づいてアライメントを行うことを可能にした。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related