エンティティ・アライメント基盤モデルにおける推論の地平を突破する
エンティティ・アライメント(EA)は知識グラフ統合の要であるが、既存手法は学習時のデータに依存するトランスダクティブな性質を持つため、未知のグラフに対して再学習なしで適用できないという転移性の欠如が長年の課題であった。
TL;DR(結論)
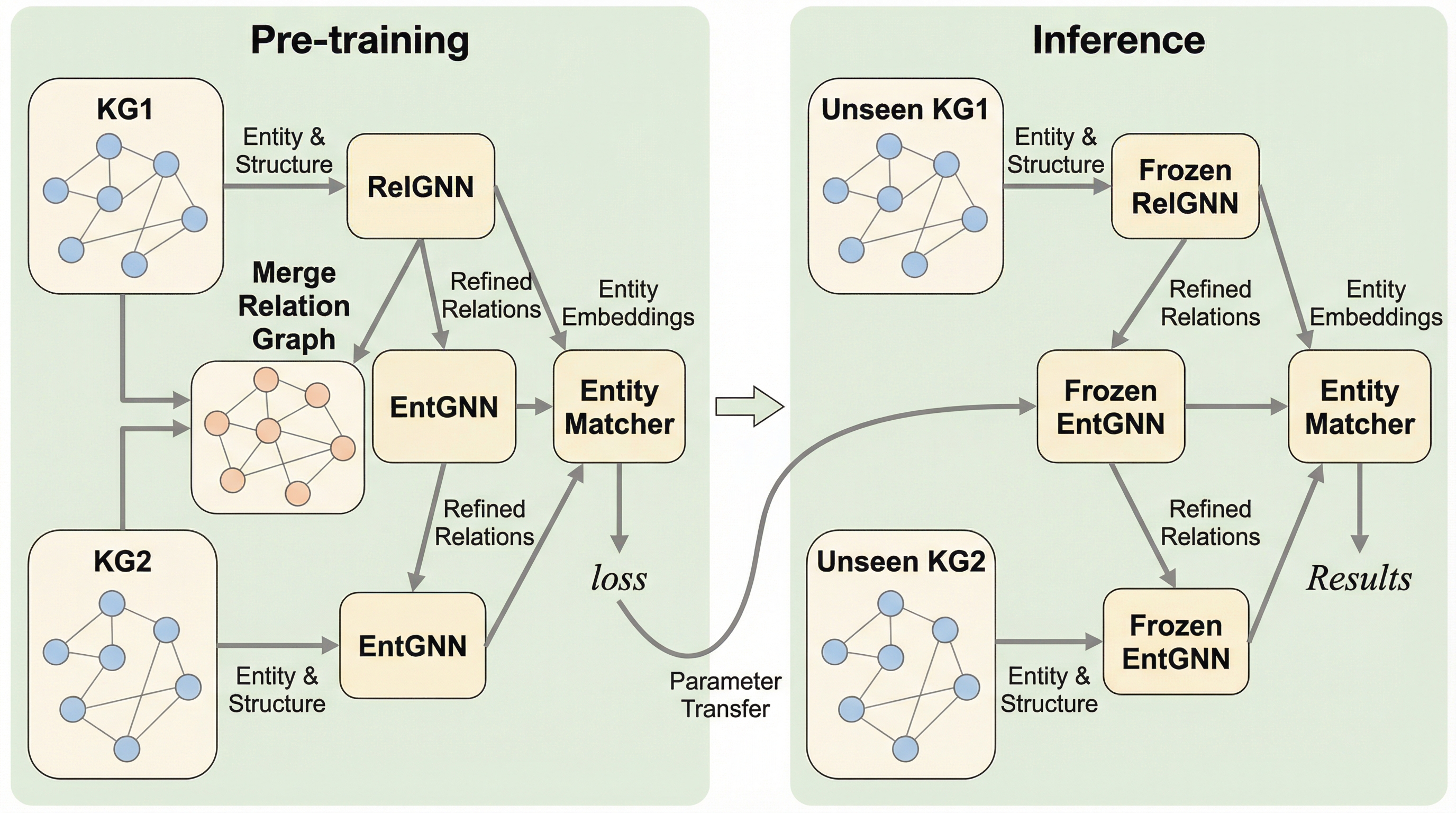
エンティティ・アライメント(EA)は知識グラフ統合の要であるが、既存手法は学習時のデータに依存するトランスダクティブな性質を持つため、未知のグラフに対して再学習なしで適用できないという転移性の欠如が長年の課題であった。本研究はこの限界を打破するため、一度の学習で任意の未知の知識グラフペアをアライメント可能な、エンティティ・アライメント専用の基盤モデル「EAFM」を提案した。 既存のグラフ基盤モデルをEAに転移させる際の障壁として、離れた二つのグラフ構造を跨ぐ推論が困難になる「推論の地平のギャップ」を定量的に分析し、これを解決するためにシード対をローカルアンカーとして利用する並列エンコーディング戦略を導入した。これにより、広大なグローバル構造の探索を、アンカーを起点とした効率的な局所的相対マッチングへと変換し、推論経路を劇的に短縮することに成功した。 OpenEAやDBpediaなどの主要なベンチマークを用いた実験の結果、提案モデルは未知の知識グラフに対しても優れたゼロショット性能を示し、従来のグラフ基盤モデルをリンク予測として適用した場合と比較して圧倒的な精度向上を達成した。本モデルは、特定のエンティティIDに依存しない構造的パターンの学習を通じて、大規模かつ多様な知識グラフの融合を効率化する実用的なソリューションを提供するものである。
なぜこの問題か
知識グラフ(KG)は、質問応答や推薦システムなどの様々なAIアプリケーションにおいて不可欠なリソースとなっている。しかし、現実世界の知識グラフは異なるデータソースから独立して構築されることが多く、命名規則やスキーマの構造において不均一性が生じるという問題がある。エンティティ・アライメント(EA)は、複数の知識グラフ間で同じ対象を指す等価なエンティティを特定する技術であり、マルチソースな知識グラフを統合する上で極めて重要な役割を果たす。既存のEA手法の多くは埋め込みベースであり、エンティティや関係性を低次元空間に写像することで構造的な類似性を捉えようとするが、これらは特定のエンティティ集合に密結合したトランスダクティブな設定で動作する。そのため、ある知識グラフのペアで学習したモデルを、未知の知識グラフに直接転移させることができず、新しいタスクが発生するたびにゼロから再学習を行う必要があり、計算コストと効率の面で大きな制約となっていた。 最近では、ノードIDを記憶する代わりに普遍的な関係パターンやトポロジー構造を利用する知識グラフ基盤モデル(KGFM)が登場し、未知のグラフへの転移性が期待されている。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related