カメラとIMUの融合による堅牢な路面分類のための新しいデータセットとフレームワーク
従来の路面分類技術は、日中の良好な視界を前提とした単一センサーの手法が主流であり、夜間や豪雨、未舗装路といった過酷な実環境下での堅牢性や汎用性に課題があった。本研究では、カメラ画像と慣性計測装置(IMU)のデータを統合し、環境変化に柔軟に対応できる新しいマルチモーダル学習フレームワークを提案することで、視覚情報が制限される条件下でも安定した認識を実現した。 提案手法の核心は、軽量な双方向クロスアテンション機構と適応型ゲート融合モジュールを導入した点にあり、画像と振動の情報を相互に補完させながら、状況に応じて各センサーの寄与度を動的に調整する。これにより、特定のセンサーがノイズの影響を受けた場合でも、もう一方の情報を優先的に活用することで、高精度かつ一貫性のある路面判別を継続することが可能となった。 検証のために構築された大規模データセット「ROAD」は、実世界の多様な天候や照明条件、連続走行シーケンス、さらには合成データを含んでおり、従来のベンチマークを大幅に上回る性能向上を実証した。この成果は、安価なセンサー構成での高度な路面理解を可能にし、車両の走行環境に応じた適切な予防保守システムの実現や、自動運転技術の信頼性向上に大きく貢献するものである。
TL;DR(結論)
従来の路面分類技術は、日中の良好な視界を前提とした単一センサーの手法が主流であり、夜間や豪雨、未舗装路といった過酷な実環境下での堅牢性や汎用性に課題があった。本研究では、カメラ画像と慣性計測装置(IMU)のデータを統合し、環境変化に柔軟に対応できる新しいマルチモーダル学習フレームワークを提案することで、視覚情報が制限される条件下でも安定した認識を実現した。 提案手法の核心は、軽量な双方向クロスアテンション機構と適応型ゲート融合モジュールを導入した点にあり、画像と振動の情報を相互に補完させながら、状況に応じて各センサーの寄与度を動的に調整する。これにより、特定のセンサーがノイズの影響を受けた場合でも、もう一方の情報を優先的に活用することで、高精度かつ一貫性のある路面判別を継続することが可能となった。 検証のために構築された大規模データセット「ROAD」は、実世界の多様な天候や照明条件、連続走行シーケンス、さらには合成データを含んでおり、従来のベンチマークを大幅に上回る性能向上を実証した。この成果は、安価なセンサー構成での高度な路面理解を可能にし、車両の走行環境に応じた適切な予防保守システムの実現や、自動運転技術の信頼性向上に大きく貢献するものである。
なぜこの問題か
輸送部門において、車両の予期せぬ故障や画一的なメンテナンススケジュールに起因する計画外のダウンタイムは、運用効率を著しく低下させ、多大な経済的コストを招く深刻な要因となっている。現在の多くの保守計画は、走行距離や稼働時間といった単純な指標に基づく「使用ベースの保守」戦略に依存しており、車両が実際にどのような過酷な路面状況で運用されているかという個別の変動性が十分に考慮されていない。車両が想定よりも厳しい条件下で使用された場合、部品交換の遅れは安全リスクを高め、最終的には重大な故障につながる恐れがある。一方で、使用状況が想定よりも穏やかな場合に画一的な整備を行うことは、不必要なメンテナンスコストと資源の浪費を招くことになる。 近年の人工知能技術の進展により、車両の走行環境をリアルタイムで把握し、実際の運用条件に適応したメンテナンス計画を策定する「路面分類(RSC)」への期待が高まっている。しかし、既存の路面分類技術には主に二つの大きな限界が存在する。…
核心:何を提案したのか
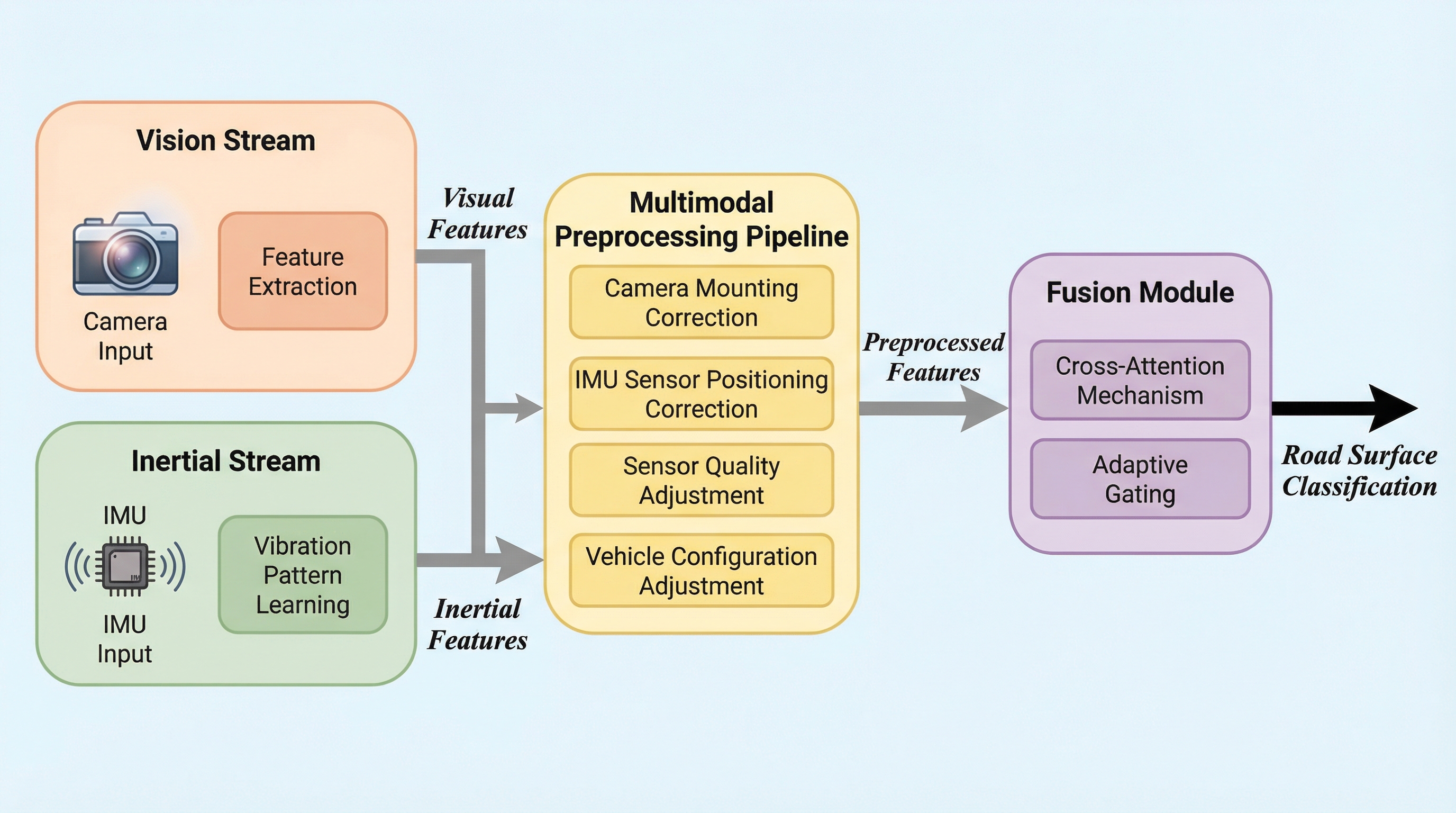
本研究の核心は、カメラ画像と慣性計測装置(IMU)のデータを効果的に融合させる新しいマルチモーダルフレームワークの提案と、それを支える包括的なデータセット「ROAD」の構築にある。提案されたフレームワークは、実世界の走行において直面する「視覚的な外観の変動」「センサー設置位置の差異」「車両の動きに伴う影響」「環境やドメインの変化」という四つの主要な変動要因を明示的に軽減するように設計されている。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related