カメラとIMUの融合による堅牢な路面分類のための新しいデータセットとフレームワーク
本研究は、カメラ画像と慣性計測装置(IMU)のデータを統合し、軽量な双方向クロスアテンションと適応型ゲーティング層を用いることで、夜間や豪雨、激しい砂埃といった過酷な環境下でも路面を正確に分類する新しいマルチモーダルフレームワークを提案しています。
TL;DR(結論)
本研究は、カメラ画像と慣性計測装置(IMU)のデータを統合し、軽量な双方向クロスアテンションと適応型ゲーティング層を用いることで、夜間や豪雨、激しい砂埃といった過酷な環境下でも路面を正確に分類する新しいマルチモーダルフレームワークを提案しています。 実世界の多様な照明や天候を網羅した記録、劣悪な条件に特化した画像群、および未知の環境への汎用性を検証するための合成データの3つで構成される新しいデータセット「ROAD」を導入し、従来のベンチマークでは不十分だった実環境における系統的な評価を可能にしました。 実験では、既存のベンチマークで1.4ポイント、新しいROADデータセットで11.6ポイントの精度向上を達成し、特に視覚情報が制限される状況下でも、IMUが冗長な情報を提供することで高い分類精度と時間的な安定性を維持できることを証明しました。
なぜこの問題か
輸送部門において、予期せぬ車両の故障や、画一的なメンテナンススケジュールに起因する計画外のダウンタイムは、運用の効率性を著しく低下させ、多大なコスト増大を招く大きな要因となっています。現在のメンテナンス計画の多くは、走行距離や稼働時間といった単純な指標に基づく「使用ベースの戦略」に依存しており、車両が実際にどのような路面環境を走行しているかという動的な負荷が考慮されていません。例えば、車両が想定よりも過酷なオフロードや荒れた路面を走行し続けた場合、部品交換の遅れは重大な安全リスクを招き、最終的には深刻な故障につながる恐れがあります。一方で、路面状態が良好な場所のみを走行している場合に、規定の距離だけで部品を交換することは、不必要なコストと資源の浪費につながります。 人工知能を用いた路面分類(RSC)は、こうした課題を解決し、実際の運用条件に適応したメンテナンス計画を策定するための鍵となる技術です。しかし、既存の路面分類技術には主に2つの大きな制限が存在します。第一に、多くの手法が日光が十分にあり、制御された条件下で収集されたデータセットに基づいて開発されている点です。…
核心:何を提案したのか
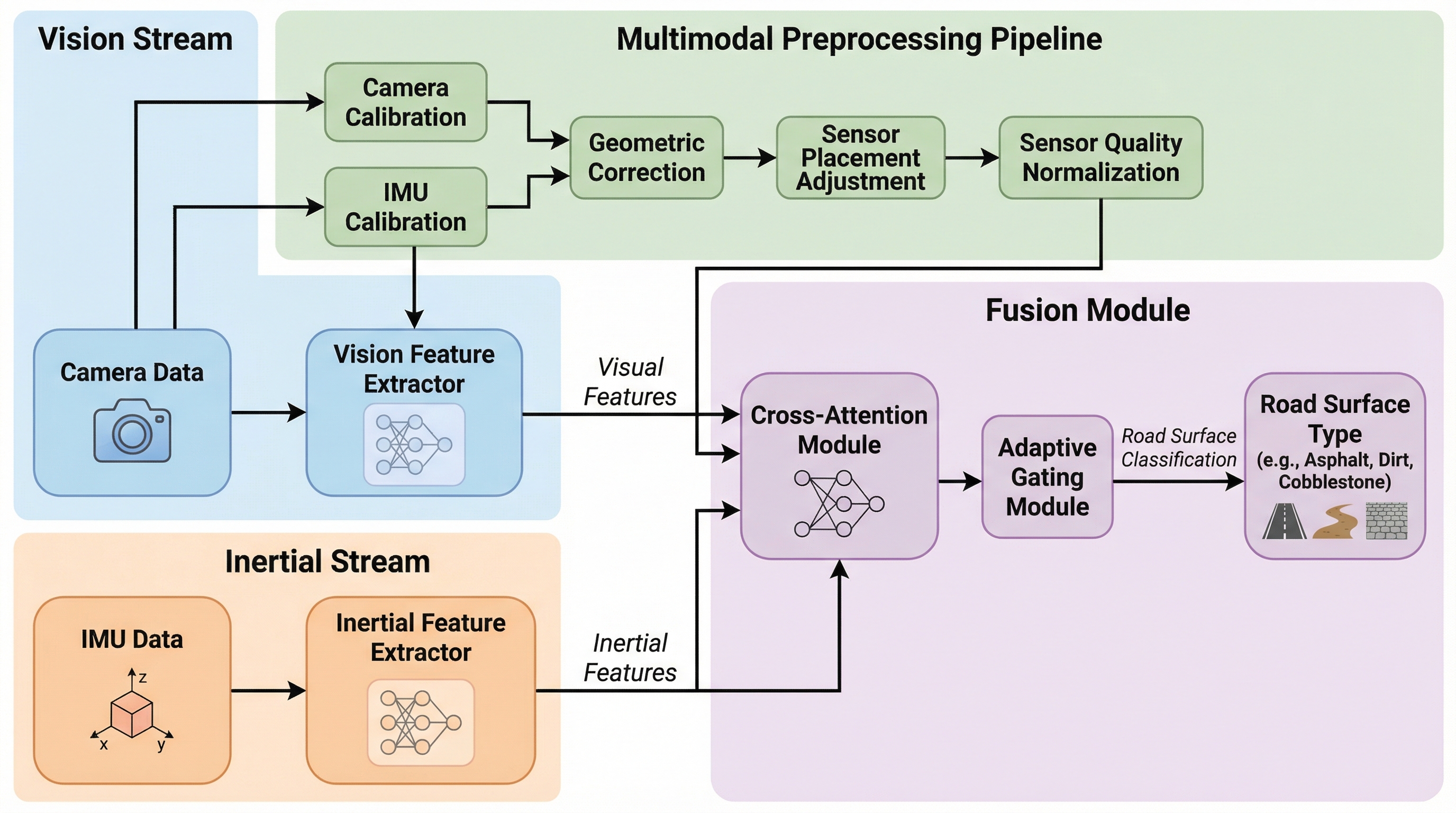
本研究の核心は、カメラ画像と慣性データの融合により、実世界の多様な条件下で信頼性の高い路面分類を実現するマルチモーダルフレームワークを提案したことにあります。このフレームワークは、視覚的な手がかりと、車両のダイナミクスに関連する振動パターンの両方を組み合わせることで、特定のセンサーが苦手とする状況を相互に補完するように設計されています。具体的には、照明や天候の変化に左右されやすい視覚ストリームと、路面の凹凸を直接的に捉える慣性ストリームを統合し、環境の変化(ドメインシフト)に対して強い耐性を持たせています。…
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related