不完全な知識グラフでも迷わない:検索で足場を作るLLM推論「ROG」
複雑な論理クエリを、不完全な知識グラフに投げたとき、答えはどこまで信用できるのでしょうか? 一見すると「論理的に見える」問い合わせでも、内部では段階的な集合操作の連なりになりやすく、途中の小さな取り違えが最後まで尾を引きます。 学習した「演算子」に頼るほど、深い推論ほど、誤差は静かに積み上がります。
論文図解
TL;DR(結論)
- 論文が提案するのは ROG という、検索拡張型の枠組みです。
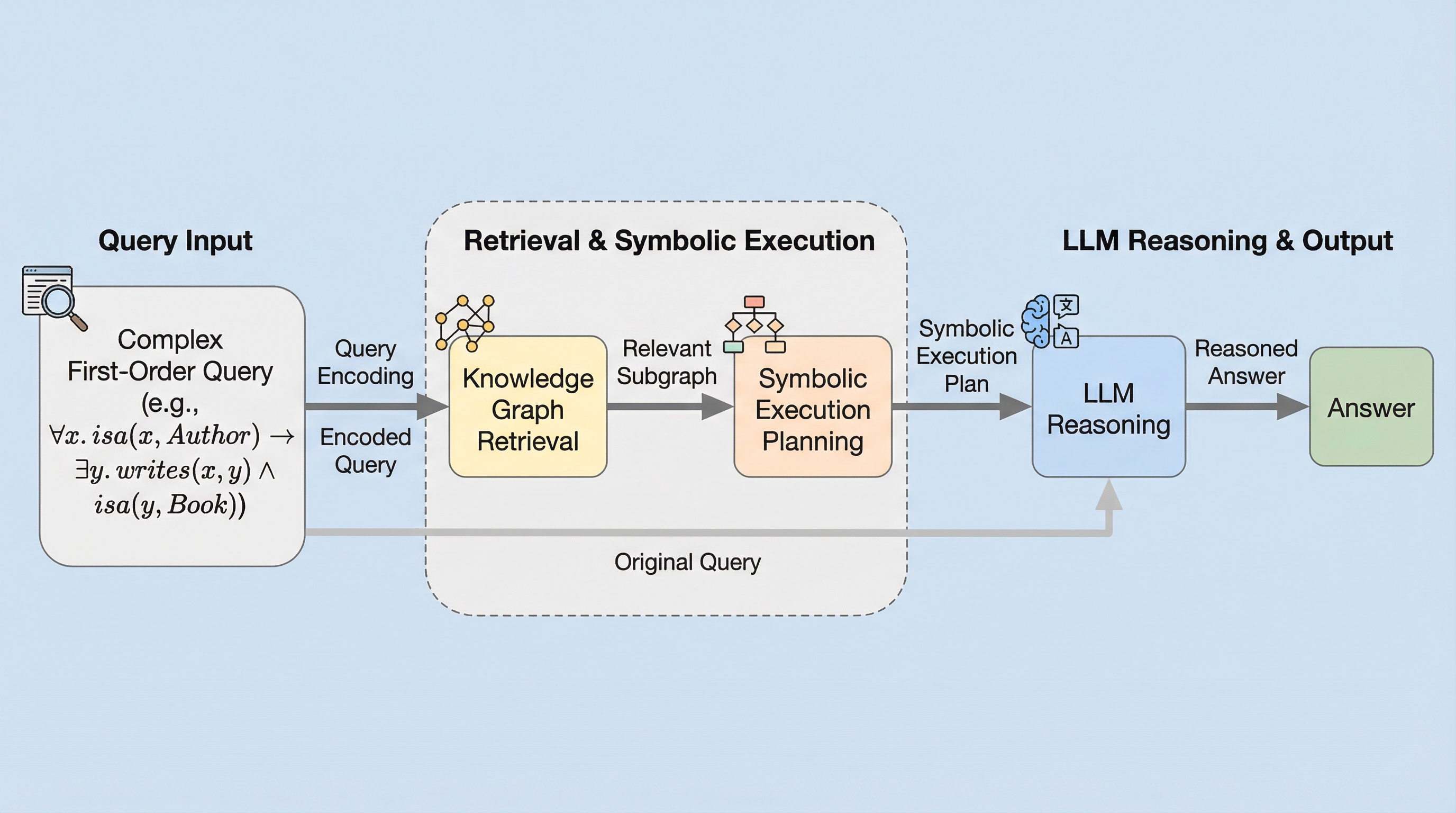
- 狙いは、埋め込み上で演算子を学習して回すのではなく、クエリに関連する近傍証拠を取りに行き、それを根拠にLLMが段階推論する形へ寄せることです。
- ROGは、まずクエリを「地に足のついた実体と関係」から出発し、論理制約を満たすエンティティ集合を返す問題として扱います。
なぜこの問題か
知識グラフ(KG)は、事実を「関係の三つ組」として蓄え、そこから構造化された推論を可能にします。FreebaseやWordNetのような大規模知識ベースが想起される領域です。ここでの魅力は、単なるキーワード検索ではなく、関係の構造を辿ることで「条件を満たす集合」を返せる点にあります。
核心:何を提案したのか
論文が提案するのは ROG という、検索拡張型の枠組みです。狙いは、埋め込み上で演算子を学習して回すのではなく、クエリに関連する近傍証拠を取りに行き、それを根拠にLLMが段階推論する形へ寄せることです。つまり「学習済み演算子が正しく働くはず」という前提を弱め、都度の検索で“その場の根拠”を用意する方向へ軸足を移します。
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related