Relevanceに基づいて「必要な知覚だけ動かす」:マルチモーダル逐次知覚のスケジューリング設計
人間と協働するロボットでは、物体検出や姿勢推定など複数の知覚モジュールを毎フレーム動かすと遅延が蓄積し、逐次処理の現場ではむしろ全体性能を落とします。 提案手法は、前フレームの出力・動き・relevance を使って「今どのモジュールを起動すべきか」を reward ベースで判断し、不要なモジュールは推定でつなぐ軽量スケジューリングです。 実験では通常の並列パイプライン比で遅延を最大27.52%削減し、MMPose の activation recall を最大72.73%改善しつつ、keyframe accuracy も最大98%に達しました。
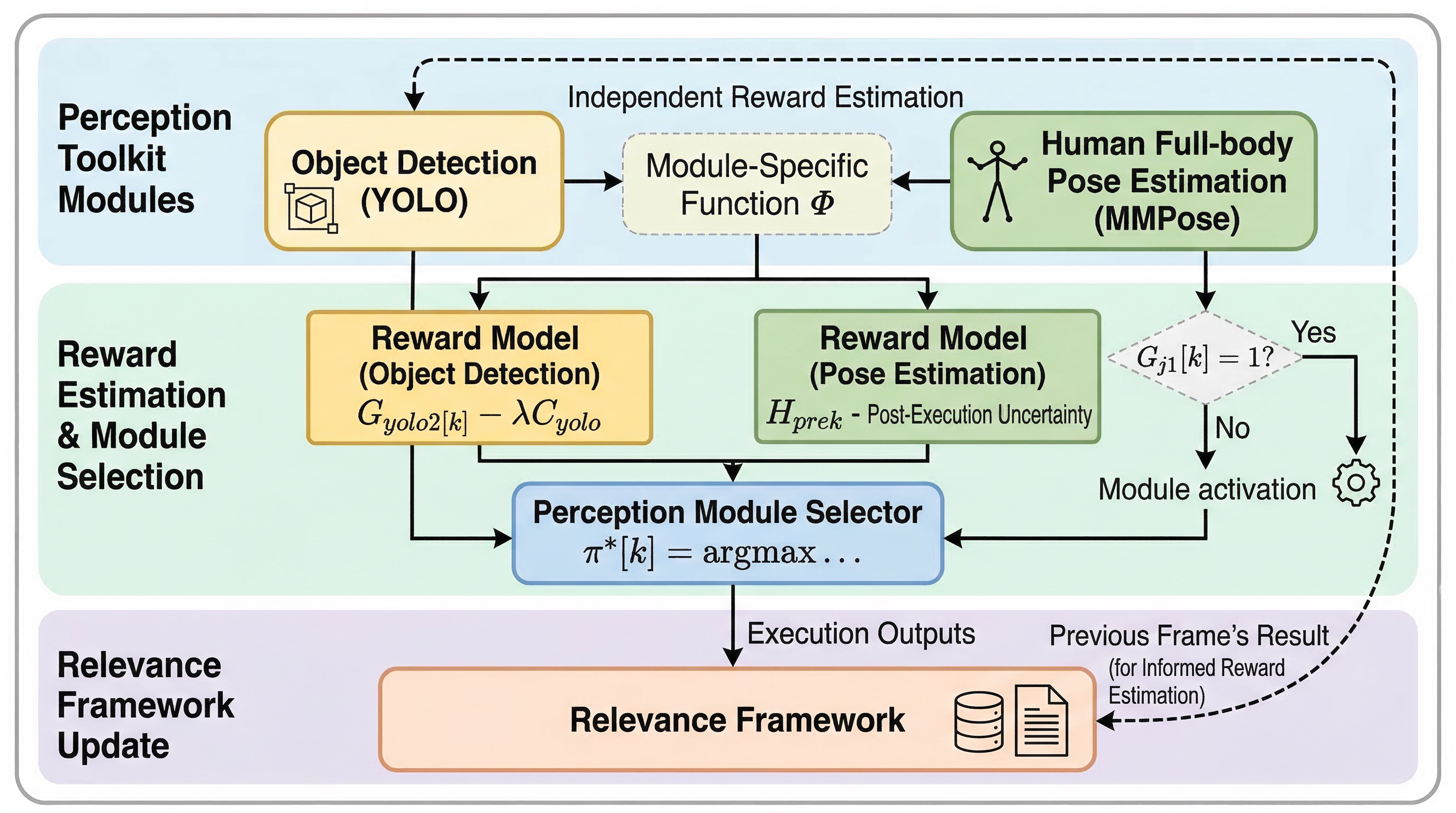
論文図解
TL;DR(結論)
- 人間と協働するロボットでは、物体検出や姿勢推定など複数の知覚モジュールを毎フレーム動かすと遅延が蓄積し、逐次処理の現場ではむしろ全体性能を落とします。
- 提案手法は、前フレームの出力・動き・relevance を使って「今どのモジュールを起動すべきか」を reward ベースで判断し、不要なモジュールは推定でつなぐ軽量スケジューリングです。
- 実験では通常の並列パイプライン比で遅延を最大27.52%削減し、MMPose の activation recall を最大72.73%改善しつつ、keyframe accuracy も最大98%に達しました。
なぜこの問題か
人間とロボットが同じ場で協働する場面では、知覚は単に「見えていればよい」では済みません。ロボットは人の位置、姿勢、周囲の物体、作業文脈などを継続的に追いながら、その時々に適切な支援を行う必要があります。そのため実運用の知覚系は、物体検出、姿勢推定、場合によっては音声や文脈理解まで含む複数モジュールを同時に走らせる構成になりがちです。
核心:何を提案したのか
提案の中心は、multimodal streaming perception のための perception scheduling framework です。各フレームで利用可能なモジュールを全部回すのではなく、前フレームまでの出力とシーン状態から、その時点で必要なモジュールだけを選んで起動します。不要と判断されたモジュールは単純に欠落扱いにするのではなく、運動モデルやフィルタなどの軽量推定で出力を補い、ストリームを切らさないようにします。
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related