FECBF:多機 UAV の衝突回避で CBF-QP が詰む原因を「内部非両立」と捉え直し、実際に解ける方向へ押し戻す
多数の UAV が密集すると、Control Barrier Function による安全制約は理屈上正しくても、制約同士が内部で食い違い、CBF-QP が解なしになることがあります。 提案手法 FECBF は、まず複数 CBF 制約の internal compatibility を解析し、そこから導かれる sign-consistency 条件を QP に追加して、制約同士の衝突を起こしにくくします。 50・100・150 機のシミュレーションでは既存法より高い Success Rate と低い Infeasibility Count を示し、遅延付き条件や実機実験でも有効性を確認しています。
論文図解
TL;DR(結論)
- 多数の UAV が密集すると、Control Barrier Function による安全制約は理屈上正しくても、制約同士が内部で食い違い、CBF-QP が解なしになることがあります。
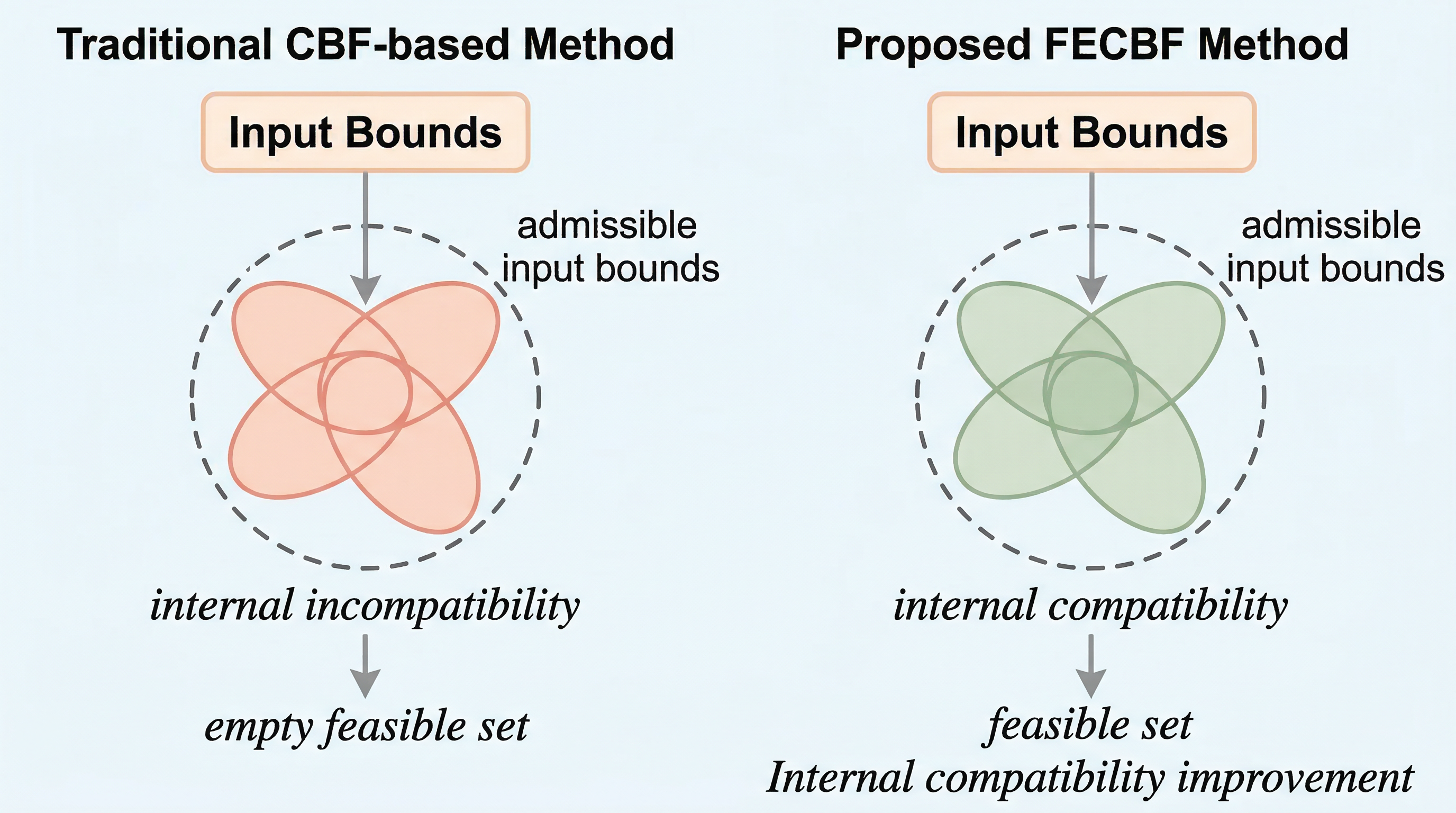
- 提案手法 FECBF は、まず複数 CBF 制約の internal compatibility を解析し、そこから導かれる sign-consistency 条件を QP に追加して、制約同士の衝突を起こしにくくします。
- 50・100・150 機のシミュレーションでは既存法より高い Success Rate と低い Infeasibility Count を示し、遅延付き条件や実機実験でも有効性を確認しています。
なぜこの問題か
複数の UAV が同じ空域を飛ぶ状況では、衝突回避は最も基本的な安全課題です。探索、点検、農業、配送のような用途では、単機ではなく群れとして動くことが多く、今後は密度の高い運用も増えます。こうした場面では、各機体が相手を避けつつ目的地へ向かう必要がありますが、単に避ければよいわけではなく、数理的な安全保証も求められます。
核心:何を提案したのか
提案の中心は FECBF、すなわち feasibility-enhanced control barrier function です。発想は明快で、従来法のように「QP を解く」ことだけに注目するのではなく、「なぜ解けなくなるのか」を制約構造の側から分析し、その原因に手を入れます。
続きはログイン/プランで閲覧できます。
続きを読む
ログインで全文を月 2 本まで無料で読めます
無料プランで全文は月 2 本まで読めます。
Related